
岸桥主要有四大驱动机构,为起升机构、俯仰机构、小车机构、大车行走机构。各机构完成各自的任务,而各机构又相互联系。
一、各机构简介
- 起升机构
它由两台交流变频电机驱动,电机通过梅花型弹性联轴器(高速联轴器)与减速箱输入轴相连。两个钢丝绳卷筒通过两个齿形卷筒联轴器(低速联轴器)与减速箱输出轴相连。高速联轴器和卷筒联轴器将电机产生的驱动力矩经减速箱放大后传递到卷筒上,通过钢丝绳缠绕系统及提升系统(吊具或吊钩横梁)提升或下降货物。
- 俯仰机构
它由一台交流变频电动机驱动,电动机通过梅花型弹性联轴器(高速联轴器)与减速箱输入轴相连。钢丝绳卷筒通过齿形卷筒联轴器(低速联轴器)与减速箱输出轴相连。高速联轴器和卷筒联轴器将电动机产生的驱动力矩经减速箱放大后传递到卷筒上,通过俯仰钢丝绳缠绕系统使前大梁起升或者下降。一般岸桥的大梁俯仰只设两个位置,即水平位置(工作位置)和升到80度顶端的非工作位置。如图:

- 小车机构
它由一台交流变频电动机驱动,电机通过梅花型弹性联轴器(高速联轴器)与减速箱输入轴相连。钢丝绳卷筒通过齿形卷筒联轴器(低速联轴器)与减速箱输出轴相连。高速联轴器和卷筒联轴器将电机产生的驱动力矩经减速箱放大后传递到卷筒上,从而使小车通过钢丝绳牵引向前(海侧)或向后(陆侧)运行。
- 大车行走机构
大车行走机构驱动岸桥沿着大车轨道行走。起重机每角配8个轮子,其中一半是驱动轮,每套驱动装置驱动一个车轮。采用16个交流变频电机和两个变频器,一个用于驱动海侧电机,另一个驱动陆侧电机。除了在高速轴上安装了制动器外,每个被动轮上还安装了液压轮边制动器来防止起重机在工作时被突发阵风吹动。每个驱动装置都设置了高速轴盘式推杆制动器,共16个高速轴制动器足以在25m/sec风速时刹停大车。高速轴制动器和每个从动轮上安装的轮边制动器共同工作,足以抵抗35m/sec风速的非工作风。但是如果预测风速超过35m/sec,应正确使用锚定和系固装置。(具体风速按各公司规定执行)
岸桥的起升机构在整台设备中起到关键的作用,是设备运行的关键。各类联锁装置和保护最多、最复杂、要求最高,是整机安全运行命脉。
(一)起升联锁装置
- 起升电机超速保护
限位开关安装在一个卷筒末端,是起升机构的外部超速保护装置。超速时该开关将执行紧停操作。对应电动机最大速度110%(可调)。一旦它被激活,就必须采取手动复位才能继续操作岸桥。另外也可以由位于电动机末端的增量型编码器向PLC提供电机实时转速的信号,由PLC判断电动机是否超速。
- 高速轴制动器限位开关
两个起升制动器都是由一个制动器释放限位开关(常开触点)监测。在没有起升手柄命令的情况下,激活其中任何一个限位开关,都会禁止起升动作。相反在有起升手柄命令的情况下,其中任何一个限位开关无信号也将会终止起升作业并报出故障。
- 低速制动器限位开关
两个低速制动器(也叫夹轮器、应急制动器)都是由一个制动器释放限位开关(常开触点)监测。在没有起升选择命令的情况下,激活其中任何一个限位开关,都会禁止起升动作。同理在有起升选择命令时只要任何一个信号检测不到将停止起升作业。更重要的是该信号如不正常高速制动器是绝对不允许打开给予设备运行。
- 电动机温控开关
两台起升电动机都有一个内置的温控开关(常闭触点)。该开关激活表明电动机温度处于不正常状态,将禁止起升继续动作。
- 称重系统
称重系统提供了起升的荷载显示和超载保护。四个重量传感器分别被安装在前大梁端部,它们能分别测出每根钢丝绳张力,并由PLC(可编程逻辑控制器)及CMS(起重机管理系统)计算并记录所吊载荷及载荷偏心距等信息,让操作人员一目了然。当起重符合超载或偏载时给出相应的声光报警。
- 防挂舱系统
当发生挂舱时,液压系统将使发生挂舱的油缸泄压,同时安装在挂舱液压油缸上的压力开关和电系统的超负荷传感器均向驱动器和PLC送出信号,紧急停止起升上升,这时防挂舱油缸发生动作,吸收机械系统内惯性能量,整个挂舱保护动作在不到一秒时间内完成。在第一次复位起重机控制后,才允许起升慢速下降来释放钢丝绳上的载荷,直到挂舱故障排除后才允许正常起升操作。
- 前大梁联锁
如果前大梁没有完全处于水平位置,将不能进行起升操作。前大梁处于仰起位置时,起升动作只能以低速运行(吊具必须空载)。
- 吊具状态联锁(松绳保护)
吊具顶销限位开关都动作时(即货物下降到位),禁止进一步降低吊具,它实际起着松绳保护的作用;只有当所有吊具锁销都处于释放状态或都处于锁紧状态时,才能进行起升动作。
(二)起升行程限位
正常起升终点位置由绝对值编码器控制。起升运动的零位设置在上升正常终点停止位置,但显示起升高度的零位还是以码头面为基准。对起升极限位置的控制,除了绝对值编码器外,还有位于小车底部的重锤限位开关和起升卷筒末端的凸轮限位开关,这种冗余设计的方式可以更好的提供过行程保护。

- 上升极限停止
由重锤限位开关和凸轮限位开关共同控制。激活该限位开关,电动机将紧急停止,并重新设置绝对值编码器零点(清零)。用电气房里的“限位旁路”自复位选择开关才能操作起升机构下降。(不能上升)
- 上升停止检测(即凸轮终点极限停止)
由增量型编码器和凸轮限位开关共同控制。如果此时增量型编码器没有显示起升速度为零,那么将启动紧急停车。
- 上升正常停止
由绝对值编码器和凸轮限位开关共同控制。激活该开关电动机将正常停止。此时可以在CMS系统中将绝对值编码器“手动清零”。
- 上升减速检测
由增量型编码器和凸轮限位开关共同控制。如果在凸轮限位开关的上升减速检测点动作时,增量型编码器反映起升速度值没有减小到设定范围值,那么将启动紧急停车。
- 上升智能减速
由凸轮限位开关和PLC的程序共同控制。可以根据实际速度的大小设定减速距离,目的是到达指定位置时起升速度均减小为设定值。
- 下降智能减速
在陆侧,以地面为标准可设计减速距离,同上升智能减速类似。
- 下降鞍梁保护停止
由绝对值编码器和凸轮限位开关共同控制。当小车在海陆侧下横梁正上方的时候,吊具下降将控制在指定高度。这样设计的目的是确保吊具可以安全越过海陆侧门框下横梁上表面。具体高度值取决于吊具下是否带集装箱或者所带集装箱高度。
- 下降减速检测(岸侧)
和上升减速检测类似。
- 下降正常停止
和上升正常停止类似。
- 下降极限检测
由绝对值编码器和凸轮限位开关共同控制。是对过下降(在船舱内)工况的保护。
(三)吊具倾转和挂舱保护装置
该功能由位于后大梁尾部的多功能液压系统执行。该液压系统由四个液压油缸及液压泵站阀组等组成。液压油缸与主起升钢丝绳改向滑轮相连。
起升钢丝绳通过多功能液压系统可以实现吊具的定位(倾转)和挂舱保护。
吊具的倾转通过改变液压缸的位置实现,伸长或缩短钢丝绳长度来调整集装箱绕3个相互垂直的立交轴线的转角。
挂舱保护功能是在发生挂舱紧停后将处于高速转动的起升机构系统的动能通过本装置的液压系统将它转化为热能释放掉。这样就能防止破坏性事故的发生,诸如钢丝绳拉断、岸桥结构损坏甚至倾覆或倒塌等。
液压缸的位移由设于每个油缸内的线性位移传感器监测。每个液压缸位移传感器的输出值与其1600mm的行程完全成比例。油缸工作最小位置时,每个液压缸至少伸出800mm。即油缸的0mm-800mm行程用于挂舱保护,800-1600mm用于吊具的倾转动作以及钢丝绳长短的调整。
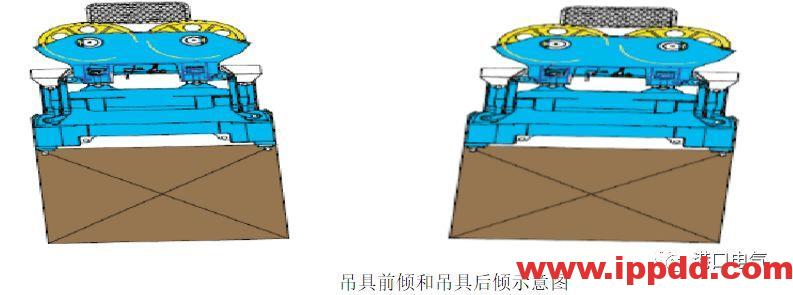
- 吊具倾转
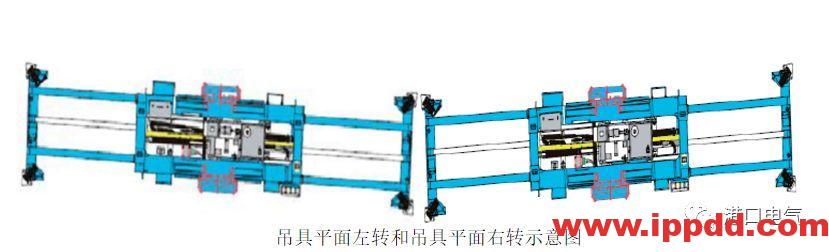
通过多功能液压系统中液压缸不同方向运动的组合,该装置可以调整吊具左右倾/ 前后倾/水平回转的角度。
l 左右倾
吊具绕垂直于大车轨道的水平轴线倾斜或转动。从司机位置看,左右倾是指吊具左右两端的升起或下降。

l 前后倾
吊具绕平行于大车轨道的轴线倾斜或转动。
l 水平回转
吊具绕铅垂轴线转动。
当左右倾/ 前后倾 /水平回转处于最大角度时,油缸不能进一步运动。在此情况下,可操作联动台上相应的归零开关将其回复至零位。
- 挂舱保护功能
典型的挂舱工况发生在吊具上升时挂或碰在某个障碍物(如集装箱船舱导架及货舱舱盖口等)。
当挂舱发生时,钢丝绳的拉力将迅速增大,挂舱液压油缸的压力也相应地增大。当四个液压缸中任何一个压力达到压力阀预设值时,相应压力开关动作,控制系统将紧急停止起升电动机,与此同时,溢流阀将打开,使液压缸收缩。
挂舱发生后,司机室里的挂舱指示灯亮起,同时会响起警报声,起重机控制将被切断,此时只能慢速放下载荷,以释放钢丝绳的张紧力,并禁止任何起升动作。
要清除挂舱状态,司机首先必须重启起重机控制,放下并卸掉货物(禁止起升,然后检查起重机的损伤情况。一切就绪后,方能启动设于电气房的复位钥匙开关,一旦复位,起重机的所有功能都将恢复。
1) 基本联锁保护
基本的连锁保护就是检查所连接的外部设备,只要设备是正常的,就可在程序里强制通断或者和同时动作的继电器并联给予作业。如起升高速制动器打开检测限位。我们检查制动器打开和关闭都很正常,因为起升高速制动器检测限位有两个,为了不影响船期计划,可以和另一个制动器检测限位并联。也可以在制动器油泵接触器处取信号等,方法很多可根据实际情况而定。这就是基本的联锁保护。
基本的联锁保护有:高速轴制动器限位开关;低速制动器限位开关;电动机温控开关;吊具状态联锁(松绳保护);上升、下降减速检测;上升、下降智能减速;上升、下降正常停止;吊具倾转个位置检测限位等。
2) 绝对联锁保护
绝对的联锁保护就是必须要满足的!少了其中的任何一项都可能造成设备的毁坏或者重大的安全事故。
在故障处理中必须停机更换恢复到出厂状态才能工作的。如前大梁联锁。如果前大梁没有完全处于水平位置时,起吊重物将会造成小车出现溜车的现象,轻者造成货损,重者就无法想象。前大梁水平位置检测限位和编码器零度位置是绝对不能改变的,只有在恢复后才能给予正常作业。
绝对联锁保护有:起升电机超速保护;称重系统;挂舱保护;前大梁联锁;上升、下降极限停止;下降鞍梁保护停止;吊具倾转位置极限保护限位等。
四、结论
综合以上对岸桥起升机构各功能保护的详细介绍,使维修人员对岸桥的起升机构的各类联锁和保护的各种工况都有一个系统的了解。提高了维修人员对设备控制系统的熟悉程度,从而在今后的维护和保养工作中知道侧重点,能够在抢修中快速的找到故障出在什么位置,能够准确的判断出需修复所花费的时间,为不影响船期提供强有力的保证。
免责声明:本文部分内容自网络,如有异议,请联系删除谢谢!
本篇文章来源于微信公众号:港口电气
