FIFTEEN.起重机电气设计_驱动系统的并联(5)

一、整流回馈单元的并联使用
西门子S120 ALM 380-480VAC 最大规格是900KW, 500-690VAC 最大规格是1400KW, 大型起重机驱动系统容量超过900/1400KW的功率,因此需要2组或以上的西门子S120整流回馈单元并联使用。西门子SINAMICS S120装置型BLM/SLM/ALM最多允许4组并联使用,即共用同一组直流母排。书本型不能并联,一般也不需要,因为可以直接选2倍功率的模块,除非有冗余切换的要求。
以前的Masterdrive并联时,需要进线电源不一样,典型做法是选三绕组变压器,二次测一个绕组是星型,另一个位三角型,构成不同的电源,因为有各自的控制单元。要是三个以上并联的话变压器做4绕组就复杂了。为了简化变压器,可以定制,以AFE为例,只用一块CUSA, 其他AFE没有控制板CUSA,主AFE的CUSA将IGBT触发信号直接送往各从AFE直接开断IGBT,调节同步触发,实现并联。
西门子SINAMICS S120系列,由于装置没有控制器,由单独的CU320控制,因此,6脉动的并联不需要有不同的进线电源,即双绕组变压器供电就可以实现。
在一些改造项目,如果之前是三绕组变压器,保留原变压器的情况下,需要用2块CU320分别控制不同的ALM/SLM/BLM。
ALM/SLM/BLM并联时,需要各模块的型号完全一样,也不允许ALM/SLM/BLM混合并联。
并联时,从变压器到ALM/SLM/BLM的电缆型号、规格、根数和长度必须是一致的,以保证得到相同的电源。
BLM的并联
由于BLM无法实现能量回馈,谐波大,功率因数不可调,从节能和降低运行成本考虑,一般不会选择这种结构形式,只是在无法实现能量回馈的起重机使用;如浮吊和轮胎吊(RTG,电RTG可回馈),采用柴油发电机作为动力,无法回馈,则采用BLM并联结构组态。
图5-1是BLM 6脉动并联的结构示意图。BLM在组态时,进线电抗器选择2%的阻抗电压。同时,并联时需要降容7.5%, 因为电流平均分配到不同的BLM无法精确实现,这在容量核算时需要考虑这降容系数。
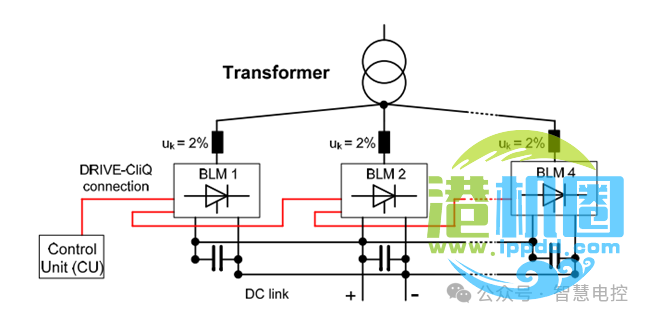
图5-1 BLM 6脉动并联结构图
图5-2是BLM 12脉动并联的结构示意图。BLM在组态时,进线电抗器选择2%的阻抗电压。同样需要降容7.5%,而且进线变压器的阻抗电压得选UK≥4%,即回路阻抗电压总值≥6%,是为了平衡各BLM之间的负荷。变压器绕组推荐Dy5d0或Dy11d0。12脉动可以降低谐波分量,但无法调整功率因数和能量回馈。
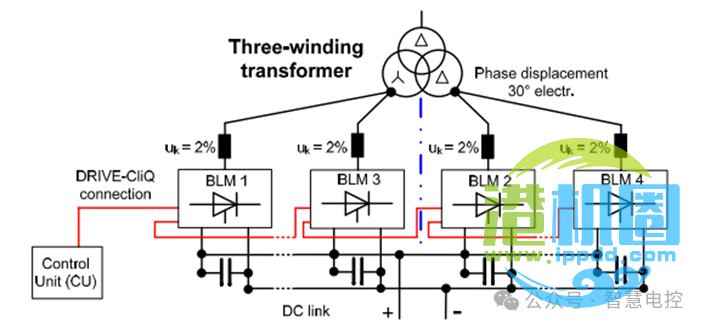
图5-2 BLM 12脉动并联结构图
SLM的并联
SLM能够实现能量回馈,但谐波还是大,功率因数不可调,从降低一次投入成本的角度是一种方式。
图5-3是SLM 6脉动并联的结构示意图。SLM在组态时,进线电抗器选择4%的阻抗电压,与BLM不一样。同时,并联时需要降容7.5%,因为电流平均分配到不同的SLM无法精确实现,这在容量核算时需要考虑这降容系数。
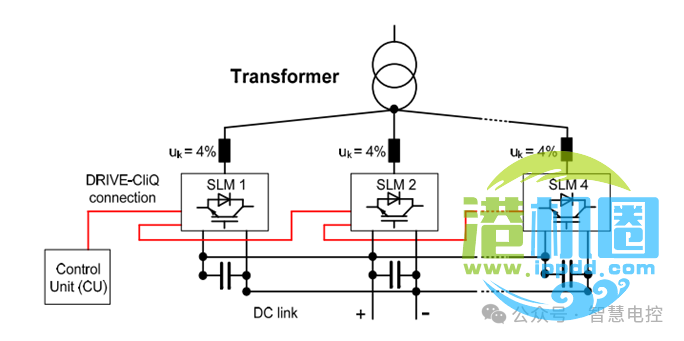
图5-3 SLM 6脉动并联结构图
图5-4是SLM 12脉动并联的结构示意图。进线电抗器选择4%的阻抗电压,与BLM不一样。同时,并联时需要降容7.5%,因为电流平均分配到不同的SLM无法精确实现,这在容量核算时需要考虑这降容系数。
由于SLM功率器件是IGBT,其出发脉冲由控制单元控制(CU320),SLM的进线电源来自不同的绕组,电压相位角相差30°,不能同时触发,因此需要由不同的CU320控制,即同一电源的SLM必须使用同一个CU320,如图中红线所示。这在我们设计时需要注意。
12脉动解决了谐波和能量回馈的需求,再加上电容柜进行动态功率因素补偿,功率因数的需求也能解决。考虑到大电容起火爆炸的可能性高,最好不要装在电气房,而是安装在机房,但需要考虑散热。这种方案三绕组变压器贵,再加上补偿电容柜,可能比ALM节约的费用有限。
船舶对谐波要求很高,因此浮吊也会采用24脉动的组态形式,即变压器4个低压绕组依次相差15°相角。这就需要4台CU320控制。
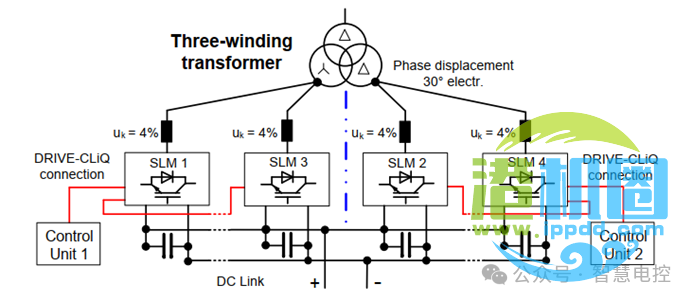
图5-4 SLM 12脉动并联结构图
ALM的并联
ALM能够完美解决能量回馈,谐波分量小,功率因数可调的需求,是理想的解决方案,虽然初期投资高,但运行成本低,长远来说也不一定贵。
图5-5是ALM 6脉动并联的结构示意图。ALM在组态时,不需要进线电抗器,因为有源整流回馈前面配置清洁滤波单元AIM (Active Interface Module)包含了进线电抗器。同时,并联时需要降容5%, 因为电流平均分配到不同的ALM无法精确实现,这在容量核算时需要考虑这降容系数。
ALM本身配置的AIM可以将谐波总量降到<5%, 因此不需要做成12脉动的形式,除非有谐波更小的苛刻要求。其他的情形是用ALM改造Masterdrive AFE时老系统是12脉动,则同样需要做成12脉动,但需要注意如前文提及发需要用2块CU320分别控制不同电源的ALM。
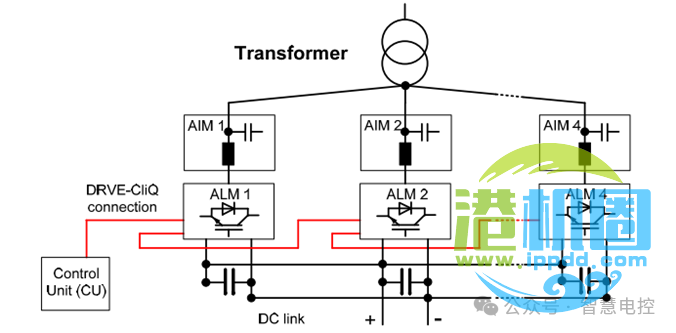
图5-5 ALM 6脉动并联结构图
二、逆变器( MM:Motor Module)的的并联使用
西门子SINAMICS S120 逆变器同样可以并联使用。MM最多4组并联使用,起重机目前还没有需要2台并联驱动那么大功率的电机,我们以前的几个MW的测试台和船舶电驱的项目需要并联,因此这儿不做介绍。
三、总结
驱动系统在做方案设计时需要确定,而且需要确定柜子的排布形式,如果出现错误,修改的代价很高,需要仔细。对于改造项目,更需要仔细勘察目前系统的结构形式,电压等级和布局方式,新柜子的空间大小是否能适应原柜子的空间,任何小的疏忽都可能造成大的损失。
2026年4月18日
Sixteen.起重机电气设计_驱动系统的设计(6)
一、驱动系统的设计
先讲个故事:2010年我在工程公司做工程部经理的时候,一位技术销售(我们称Promoter)要求我派一位工程师去帮客户调试我们工程公司卖给他们的MM440变频器,而且很急,问他客户那儿是不是具备调试条件,说都准备好了,只等我们去调试。我们派去的施工一到现场给我打电话:“王工,项目调试现场不单没接线不具备送电条件,变频器都没装进电柜里面,而是放在地面上”。双方对理解具备调试条件的内涵相差很大,可能客户觉得买过来就能直接使用,不需要设计。就如我们1998年在PSA PPT调试休息时的闲聊-有些老板说我买了你的PLC就应该能用呀!怎么还需要编什么程序?就像我买电视机一开机就可以看电视。
在实际应用场景,从产品到应用,还需要有设计的过程。
驱动是一个通用型产品,虽然很多公司也会说这是起重专用变频器,起重工艺都集成在里面,但实际情况如何还需要详细了解实际上有哪些工艺控制。并非输出一个抱闸控制信号就是所有起重工艺做好了。就算所有工艺集成了,硬件选型完成之后,还需要硬件设计和成柜,避免上面故事里面的变频器放地面开始调试。
设计包括硬件和程序设计。硬件设计方面需要给驱动配主回路电源、控制电源和控制网络,将驱动系统融进整个起重电气硬件系统。设计需要根据国际标准、国家标准和行业标准将起重工艺和保护功能分类,哪些通过硬件回路实现,哪些在PLC里面实现,哪些在驱动里面实现。硬件设计包括原理设计,器件选型,布局设计,电缆表,端子表。软件设计包括硬件配置架构,PLC程序设计,驱动系统设计,HMI设计…
设计的正确性是系统稳定运行的第一步。
驱动系统设计包括驱动系统的选型和计算,驱动系统的主电源供电,整机电气系统的硬件接口回路,柜体排布,接地系统。下面分别谈谈起重驱动系统的设计。
二、驱动系统的供电回路的保护
从变压器到驱动系统(整流回馈单元或独立变频器),一般通过电缆连接。在驱动柜进线位置至驱动系统之间,需要实现短路保护、过流保护、过压保护和欠压保护。
目前大的断路器能实现以上大部分功能,如图6-1所示:西门子3WL负荷开关用于整流回馈单元的进线负荷开关,配置的电子保护模块能实现短路保护和过流保护,再选择一个欠压跳闸线圈,就能实现以上三项功能。将合闸线圈Y1接入硬件回路,如PLC DO信号,则可以通过电气合闸,实现国标起重机开关的要求。起重机开关是开机时合闸,关机是断开,急停和超行程等紧急情况时也需要跳闸。具体做法在后面文章里面说明。
选一个过压保护装置,实现过压保护,同时实现放雷击和操作过电压保护。起重机的电源进线回路,有很长距离是通过电缆供电,不是裸导线,不会有直击雷击在导线;但起重整机是钢结构导体,虽然最高位置加了避雷器,过电压保护装置还是需要的,因为雷击会串入或感应出高电压,也有操作过电压的可能,因此防雷击和过压保护是需要配置的,否则没有过压保护功能。
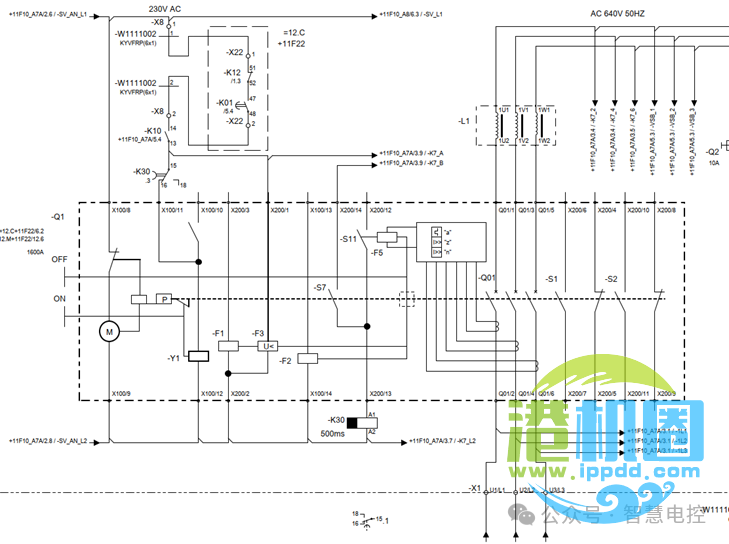
图6-1 整流逆变器进线开关原理图
负荷开关能断开一定范围的短路电流,允许断开的短路电流值能从产品目录查询获得,高于这个值无法断开,因为短路电流太大时,触头断开的拉弧会导致灭弧室的空气分子被击穿而分解成导电离子,从而成为导电体,无法断开短路电流。
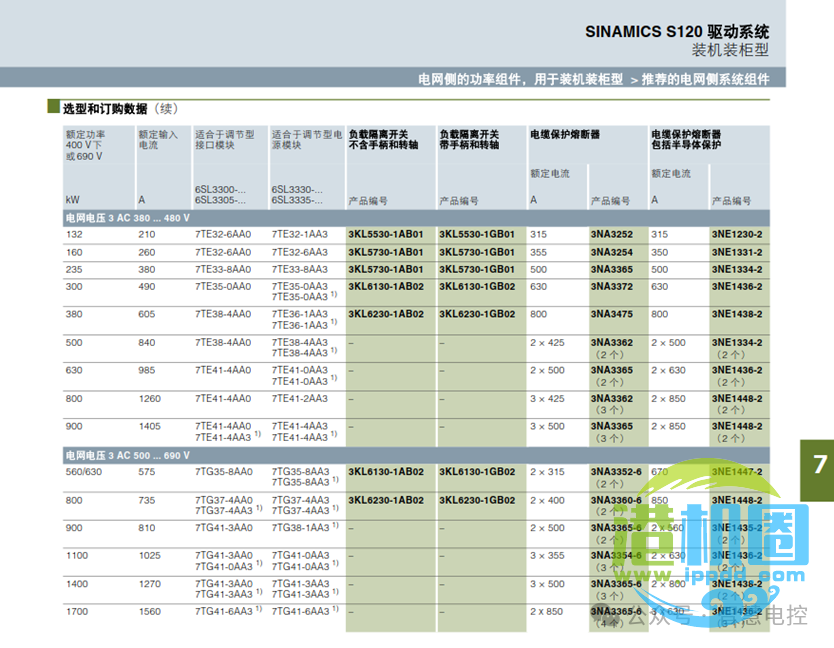
基于以上原因之一,需要配置熔断器实现短路保护。原因二是整流回馈单元的功率器件是二极管、可控硅或IGBT等半导体,发生短路时需要快速切断主回路,以保护功率器件,负荷开关无法快速切断,线路保护的熔断器也无法实现,因此,需要选择功率器件保护用熔断器作为驱动系统的短路保护。如表6-1所示的3NE系列熔断器可实现半导体保护,3NA系列熔断器只是实现线路保护的短路。
表6-1 进线电网侧的保护器件选择
三、进线接触器的选择
如前所示,负荷开关可以通过电气开断,定义为起重机开关,是否还需要进线接触器用于闭合和开断主回路?从功能实现来说是不需要。而且电流大接触器体积大,很占用空间。
负荷开关的触头机械寿命是1万次,我曾经记录了太仓环保电厂一台卸船机,在调试过程中已经使用了925次,1万次的寿命用不了几年,过了1万次需要维护,大的负荷开关结构复杂,维护工作量大,为了延长负荷开关的使用寿命,有必要增加一套接触器,用于正常操作的主回路开断,负荷开关只用于急停、超行程、短路和过载的保护,这样以来,开断的次数就减少很多,实际使用年限会长很多。
Seventeen.起重机电气设计_驱动系统的设计-电抗器的选择(7)
输出电抗器的选择
1.为什需要输出电抗器
逆变器是采用脉宽调制解调技术(PWM)将直流逆变成交流电,电压源型逆变器的电压输出是方波,电流经过电机感性绕组之后,电流成正弦波,因此电机绕组承受的dv/dt值很高。增加输出电抗器后,因为电抗器是电感绕组,通低频阻高频,能有效降低dv/dt值, 图7-1左边是没有输出电抗器是电机绕组的电压波形,右边是有输出电抗器的波形,电压质量会有明显改善。
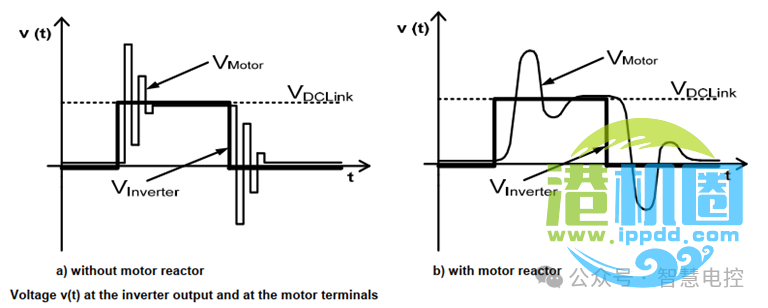
图7-1 逆变器输出和电机端电压波形图。
从逆变器到电机的电缆,电缆导体对地形成电容,电容是通高频阻低频,因此电缆对地有电缆容性漏电流。
基于以上原因,在逆变器到电机超过一定距离时,需要选择输出电抗器。电缆长度按铺设的长度计算,如果每相有多股电缆,总长度需要乘以电缆根数。
2.允许电缆长度得计算
多长的电缆需要加输出电抗器?下面有一个计算公式:
电缆允许长度计算公式:

各参数含义和取值范围:
计算公式和取值范围有点复杂,可以做好一份excel计算书,需要时填入数据自动计算。在做方案时会有些困难,因为有时布线长度一开始客户也无法准确提供,因为他设计完成之前也没数据,除非有类似的项目做参考。但可以查表格做个估算。
从表7-1和7-2有允许电缆的长度值,表7-1是以前Masterdrive的数据,可以作为参考;表7-2是SINAMICS数据,但不全。从表中可以看出功率越小长度越短,因为小功率电缆漏电电流占比比较大。
表7-1 Masterdrive变频器允许输出最大电缆长度

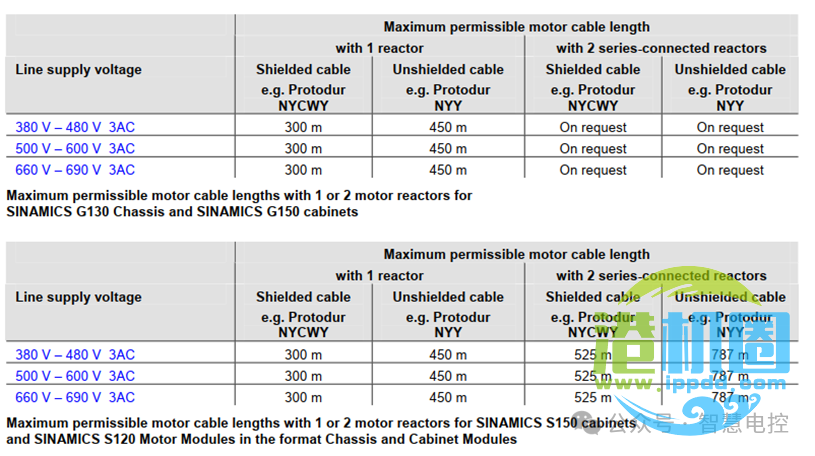
表7-2 SINAMICS变频器允许输出最大电缆长度
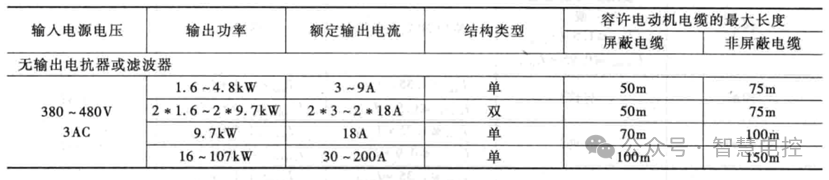
表7-3 SINAMICS变频器增加输出电抗器时允许输出最大电缆长度
3.经验值
在选择输出电抗器的设计中,可以取一些以往的经验值。如:
大功率的逆变器,逆变器和电机之间电缆长度小于50米,则不加输出电抗器;50-100米之间需要认真核算一下;超100米,则增加。
逆变器驱动多电机时,过载保护的配电回路尽量靠近电机侧,如大型造船门机,大车有26个或28个电机,配电箱安装在刚腿和柔腿电气房,减少电缆总长度。
长距离的造船门机大车逆变器需要串联两台输出电抗器;电抗器安装在电气房里面,减少柜子数量,缩短直流母排长度。
按图7-2所示连接并联电缆,降低影响。
超长距离的电缆使用会有很多问题,可以通过增大逆变器的容量解决一些问题,但很难彻底解决。最好将变频器靠近电机,如大型造船门机的钩移电机,直接安装在上小车电气房。
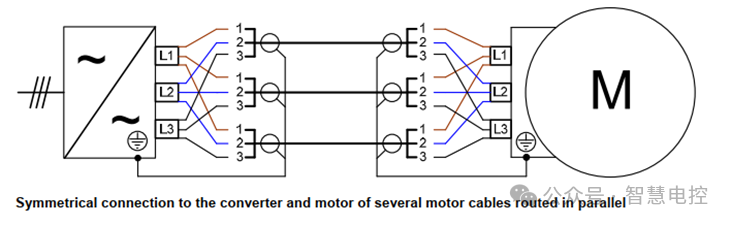
图7-2 并联电联的平衡连接图
4.dv/dt和正弦波滤波器
dv/dt和正弦波滤波器是针对工频电机和与变频电机有质量差距的电机场合使用。有些改造项目保留工频电机而选择正弦波滤波器,个人觉得不如更换成变频器电机,因为正弦波滤波器与电机相比,不一定能节约多少费用,一旦电机烧坏,导致停机。
5.结束语
大型起重的驱动系统,很多逆变器容量有好几百千瓦,功率大,输出电抗器体积大,有时得单独一台柜子才能装得下。虽然可以在电气房找个角落安装电抗器,但占用空间,有些电气房本来空间就很紧凑。增加输出电抗器能够降低电机的dv/dt的冲击,提高电机的使用寿命,但增加输出电抗器会增加成本,电机使用寿命是需要长时间来衡量,又没有准确量化数据来说明延长多久,何况电机受到多种因素影响,如大家举例这台加了输出电抗器的电机出问题比没加的时间更短。但不增加输出电抗器节约的成本立马可见。有时会不会良好的设计由于增加成本而效果需要长期可见而不招待见?觉得还是要秉承系统的长期稳定运行而顶住成本的压力,我们要做一辈子的职业,不要让客户一说起某某某就代表低质量的设计。
2026年5月2日
Eighteen.起重机电气设计_变压器的计算和选型(8)
一、变压器的选择和计算
大型起重机会配置高压变压器,岸桥、RMG、造船门机、铸造吊进线电源一般是10KV,电厂卸船机一般是6KV。因此,需要选1-2台高压变压器,将10/6KV电压降为400 V和驱动系统所需要的电压等级。我们在设计时需要提供变压器的主要技术参数给OEM或供应商,参数包括容量,高压和低压变压器电压等级,抽头的百分比,阻抗电压,过热保护。
1. 选择电力变压器还是整流变压器?
有两种变压器:电力变压器和整流变压器,起重机上选哪种合适?
先看看各有哪些特征和应用场合。
1).电力变压器
核心特征
a)功能:纯交流电压升降(等频率、等功率传输),无整流功能。
b)电压/容量:电压等级高(10kV–500kV);容量大(100kVA起,主变可达数百MVA)。
c)阻抗/损耗:短路阻抗5%–10%;设计优先低空载/负载损耗、高效率。
d)绕组/结构:常规三相(Y/D、Y/Y);无特殊移相/分裂;无直流偏磁/谐波耐受设计。
e)负载适应性:正弦波、对称、平稳负载;短时过载能力强。
典型应用
a)电厂升压站(如10.5kV→220kV)、电网枢纽变电站。
b)区域/工业变电站(220kV→110kV→35kV→10kV)。
c)风电/光伏电站升压并网、长距离输电主干线。
2).整流变压器
核心特征
a)功能:专为整流装置供电,含电压变换、移相/多脉波、谐波抑制、限流。
b)电压/容量:一次侧中高压(6kV–35kV);二次侧低压大电流(几十至数百伏,数千至数万A)。
c)阻抗/损耗:短路阻抗10%–20%(比电力变高30%+),限制短路电流;需耐受谐波与直流偏磁,杂散损耗大。
d)绕组/结构:多为分裂/多绕组、移相设计(12脉波/24脉波);常用Dd0y11、双反星形;一二次间静电屏蔽防谐波窜入电网。
e)负载适应性:非线性、冲击性负载(频繁启停、剧烈波动);抗冲击/过载能力强。
典型应用
a)电化学:电解铝/铜、氯碱、制氢(超大电流、低压)。
b)轨道交通:地铁/城轨牵引(750V/1500V直流)。
c)工业传动:轧钢、矿山提升机、直流电弧炉(快速响应、限流)。
d)高压直流输电(HVDC)换流站、电镀/电解、励磁、中频炉。
从以上特征来看,考虑到大电流的冲击和谐波的影响,我的观点是直流驱动系统选择整流变压器;S120 SLM、ALM可以选择电力变压器,因为ALM可抑制谐波,IGBT整流,变频驱动系统也不会有大的启动电流,因此可以选择电力变压器。直流系统和BLM是可控硅整流,会有冲击电流,谐波也大,因此选择整流变压器。SLM虽然也是IGBT整流,但谐波比较大,因此,可选电力变压器或整流变压器。后续我再跟熟悉的OEM了解一下目前他们选择哪种变压器,如果是选择电力变压器,使用效果如何。有反馈我在留言区告知大家。
2. 变压器容量计算。
2.1. 变压器的额定视在功率,由以下 式8-1计算:
 式8-1公式参数含义:
式8-1公式参数含义:
PW: 电机或变频器轴输出功率
ȠConverter: 变频器效率
ȠMotor: 电机效率
λ: 驱动系统功率因数
K : 考虑由于线路侧谐波电流导致的变压器杂散损耗的系数
驱动系统功率因数由以下式8-2计算:
 式8-2
式8-2
公式参数含义:
g1: 电流基波因数
Cosφ1:线路侧基波功率因数
对于变频器输出>50kW,例如,驱动系统占变压器的容量比值低时,可以取以下的近似值,而且近似值相对比较准确:
ȠConverter≈0.98:用于G130、G150变频器、S120 BLM/SLM单元
ȠConverter≈0.96:用于S150变频器以及带有S120 ALM单元
ȠMotor≈0.93-0.97:50kW的电机效率为0.93,1MW的效率为0.97,也可以查电机手册获得准确数据
λ≈0.95:G130、G150变频器以及S120 BLM/SLM
λ=1或λ= CosφAI: S150变频器和带有ALM的变频器λ=1;如果ALM参数设置,则去设置值λ= CosφAI
K=1.2:用于配置了标准配电变压器且G130无LHF、G150无LHF、S120 BLM/SLM系统
K=1.15:用于配置了标准配电变压器且G130或G150带有线路谐波滤波器LHF的系统
K=1.10:用于配置了标准配电变压器且S150和S120ALM的系统
K=1: 用于整流变压器,所有变频器类型都适用
2.2. 简易计算方法。
根据式8-1的公式,假设电机效率的平均值ȠMotor≈0.95, 变压器的额定视在功率 ST用以下方式计算:
a). 使用配电变压器时
- ST>1.4*PW:适用于不带LHF的G130变流器、不带LHF的G150以及S120 BLM/SLM单元
- ST>1.3*PW:适用于带有谐波滤波器LHF的G130或G150变流器
- ST>1.2*PW/CosφAI:适用于S150变流器和带有S120ALM的单元(CosφAI设置成1,因为ALM功率因数=1是选择ALM的重要因素,达到功率因数补偿的目的)
b). 使用整流变压器时:
- ST>1.15*PW:适用于G130/G150变频器(无论是否有LHF)、以及带有S120BLM/SLM
- ST>1.1*PW/CosφAI:适用于S150变频器和S120ALM的单元(与上面一致,通常CosφAI =1)
2.3. 根据整流回馈单元容量计算变压器容量。
为了减少重复计算,电机或变频器轴输出功率PW可以采用整流回馈单元容量,再代入2.2节的方法进行计算。整流回馈单元的容量计算在之前的篇幅有详述,这儿不再重复。
2.4 变压器最终功率的确定
以上是驱动系统所需要的变压器的视在功率,如果只有一台变压器,则需要将辅助系统的功率计算在内,通常岸桥和卸船机除驱动系统以外需要的功率是250-300KVA。变压器低压侧选两个绕组,一个给驱动系统供电,功率按以上方法计算,另一个绕组给其他设备提供400VAC电源。
变压器的功率是一系列标准化容量,计算出视在功率后,从以下最靠近的容量中选择:
100,160,250,315,400,500,630,800,1000,1250,1600,2000,2500…kVA
3 变压器其他参数的选择
西门子SINAMICS S120 BLM/SLMALM并联时,输入电源不需要取自不同的电源,因此一个绕组可以给所有驱动系统供电。主变压器只是给驱动系统供电时,选双绕组变压器就可以。高压进线根据电源情况确定,低压电压需要根据所选电机的额定电压,通过逆变系数和整流系数计算后确定电压等级,在前面的文章阐述了,不再重复。
变压器的抽头通常是 ±2.5%和±5%, 用于进线电压升高或降低时调整,也可用于调整由于变压器阻抗、进线电抗器阻抗、输出电抗器阻抗导致电机端电压低的情况。
变压器厂家在供货的时候,会将技术参数的电压提高5%,如要求500VAC, 实际输出是525VAC,用于抵消线路压降。
变压器的阻抗电压需要根据驱动系统的情况来确定,之前文章有描述,不再重复。
考虑到体积和环保,选择干式变压器,通常是环氧树脂浇筑干式变压器。
过热保护,通常从变压器取温度报警和温度故障的保护信号,送入PLC输入点,在起重机控制程序中实现相应的保护。
变压器技术参数确定之后,需要与OEM和变压器供应商一起确认所有技术数据,以免出现错误,变压器出错不容易更正。
二、总结
汇总一下,变压器需要确定这些技术参数:视在功率,高低压电压等级,阻抗电压,抽头百分比,过热保护,干式变压器,电力变压器或整流变压器。
2026年5月10日
Nineteen.起重机电气设计_驱动系统的设计:控制单元和编码器模块(9)
一、变频器控制单元的选择
1.控制单元组态形式
西门子SINAMICS S120驱动系统采用独立的功率单元和控制单元,可有效进行配置,满足各种不同驱动任务的需要。即变频器本身没有控制单元,即没有CPU,变频器本体与控制单元分开的。这与西门子上一代矢量控制变频器Masterdrive不同,每台Masterdrive都有一块控制板:CUVC、CUMC、CUSA、CUR。
控制单元有3种:CU310-2PN/DP, CU320-2PN/DP,SIMOTION D。其中PN是指通讯口为Profinet,DP为Profibus,SIMOTION后头的D是只Drive,因此还有SIMOTION C和SIMOTION P.
1)CU310-2PN/DP: 用于单轴传动,即独立的变频器。
2)CU320-2PN/DP:用于多轴传动,一个CU320可以带12个v/f控制模式的驱动,或6个矢量控制和伺服控制模式的驱动。
3)SIMOTION D:涵盖了CU320的功能,可以带的驱动更多,而且有很多运动控制的功能,因为SIMOTION的产品功能定位是运动控制。SIMOTION在2025年已经退市,运动控制功能由CPU 1500T代替,但不能带驱动系统。西门子基于SIMOTION开发的起重工艺包SIMOCRANE,也已经移植到CU320硬件平台。
CU320与PLC的通讯可以选择Profinet或Profibus,取决于PLC通讯网络是哪一种。最好选择Profinet,因为性能和稳定性都更优;在一些改造项目,如果Profibus网络不更换成Profinet,则选择CU320-2DP。
变频器和控制单元分开的这种结构组态也成为其他厂家的模仿对象,不过,在设计时需要认真确认每个控制单元能驱动几台变频器,我曾经遇到过一开始明确跟我说能驱动4台,等制造完之后告诉我只能带2台,只能增加,好在有空间,否则更被动。这也体现在变频器厂家需要给我们设计工程师提供正确的信息。可别一开始为了卖出去,说啥都行,实施起来这儿缺一些那儿缺一些。
图9-1为CU310和CU320的图片。


图9-1 控制单元 CU310和CU320
2.控制单元和变频器的通讯方式
控制单元和功率单元之间的连接采用西门子 DRIVE-CLiQ方式进行通讯,硬件回路与工业以太网是一样的。
采用这种控制单元,在主从控制的时候,只需要在一个控制单元之间的不同轴之间实现,如岸桥的起升1和起升2,卸船机的起升开闭,将主从驱动配置在同一CU320之中,则主从之间的数据交换在同一个CPU中实现。与Masterdrive相比,主从必须通过CUVC之间的SIMOLINK、Profibus主从或其他硬件回路实现数据交换,要方便很多。
3.控制单元的数量配置
大型起重一般有1-2台有源整流,岸桥有6台逆变器(起升1,起升2,小车,俯仰,大车1,大车2);如果起升与大车共用(这种模式以前变频器相对贵的时候常用,现在很少采用),小车与俯仰共用,则有3台逆变器。1块CU320最多带6个矢量控制,因此,系统需要2块CU320, 一块控制整流回馈部分,另一块控制所有逆变器。卸船机的驱动配置基本一致,只是起升1和起升2换成起升和开闭;1800t/h的卸船机可能会有2台起升和开闭各有2台逆变器,则可能需要2-3块CU320。
对于造船门机,除钩移变频器之外,主要驱动系统有2-3台有源整流, 有8台逆变器(主钩1,主钩2,主钩3,副钩,上小车,下小车,刚腿大车,柔腿大车),需要选3块控制单元,一块控制有源整流,另2块控制控制逆变。
如果整流部分的电源取自不用的电源,如三绕组高压变压器的星三角绕组,则需要采用不用的CU320控制,在前面变频器并联的文章也做了说明,需要注意。特别是改造项目,由于以前AFE并联需要不同的电源,常有三绕组变压器的情况。
4.硬件连锁的实现。
由于起重对安全特别重视,国家标准对此也有相应的要求。因此,我们在设计时往往会考虑硬件连锁,如在按下急停按钮、超行程的紧急限位动作、超速等紧急情况下,需要有以下紧急停车动作:
1)断开起重机开关(后续再描述)。
2)关上正常工作抱闸和液压紧急抱闸。
3)PLC向驱动系统发出停止指令。
4)将急停信号通过硬接线送入变频器,使变频器停止输出电流。
在上面的第4)点里面,如图9-3,如果不选择额外的端子模块,由于书本型变频器没有DI/DO口,因此,需要利用CU320的DI, 如图9-2的 -X122 DI0-3, DI16,DI17; -X123 DI4-7, DI20,DI21,作为紧急停车信号输入。
装置型的逆变器,如图9-4,可以利用自身的-X41的1、2端子的DI作为紧急信号的输入。也可以使用上面提及的CU320的DI。
同样地,在获取抱闸允许打开的条件时,驱动系统会通过Profinet/Profibus向PLC发送允许抱闸打开的信号;同时, 也通过CU320的DO提供硬件的连锁给抱闸控制回路。如图9-2端子-X122的9-13端子。
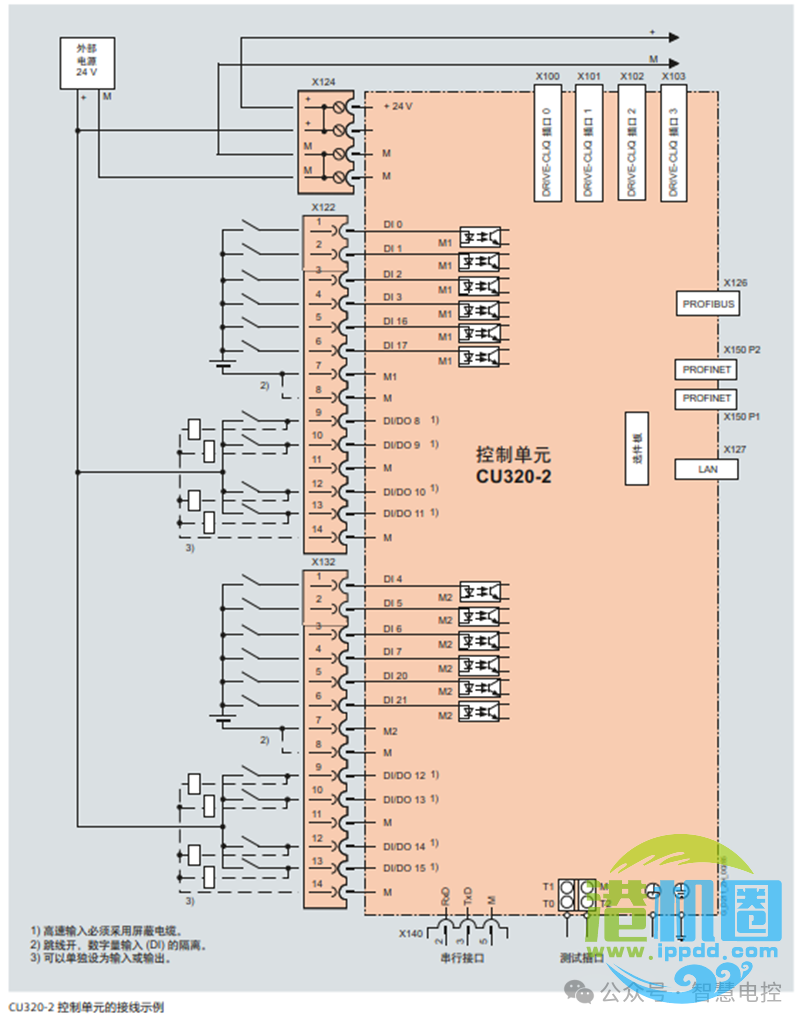
图9-2 CU320-2控制单元接线图。
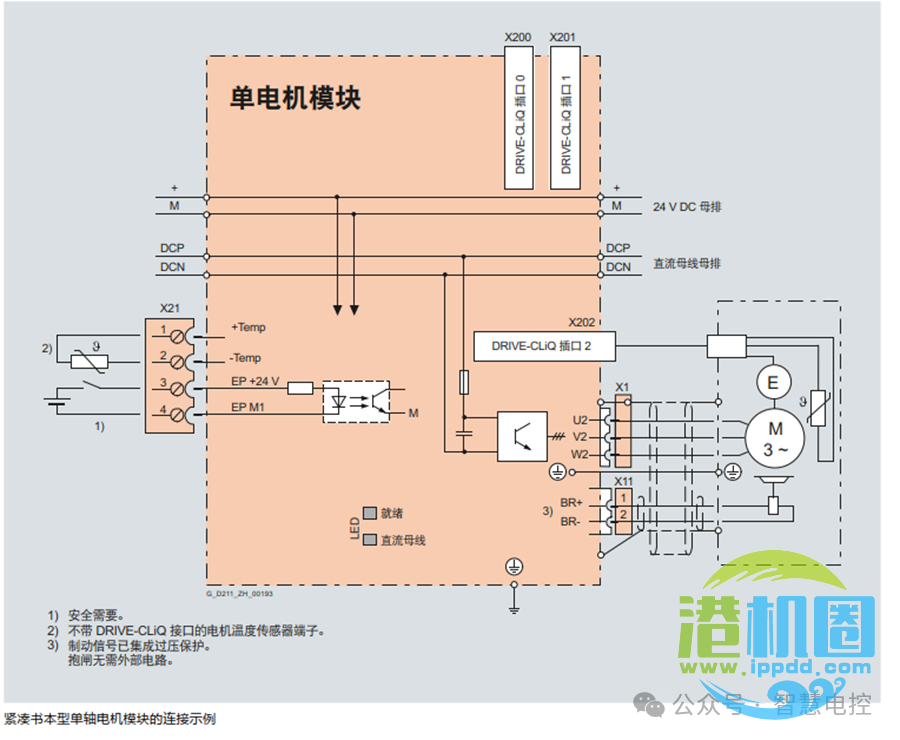
图9-3 紧凑书本型电机模块。
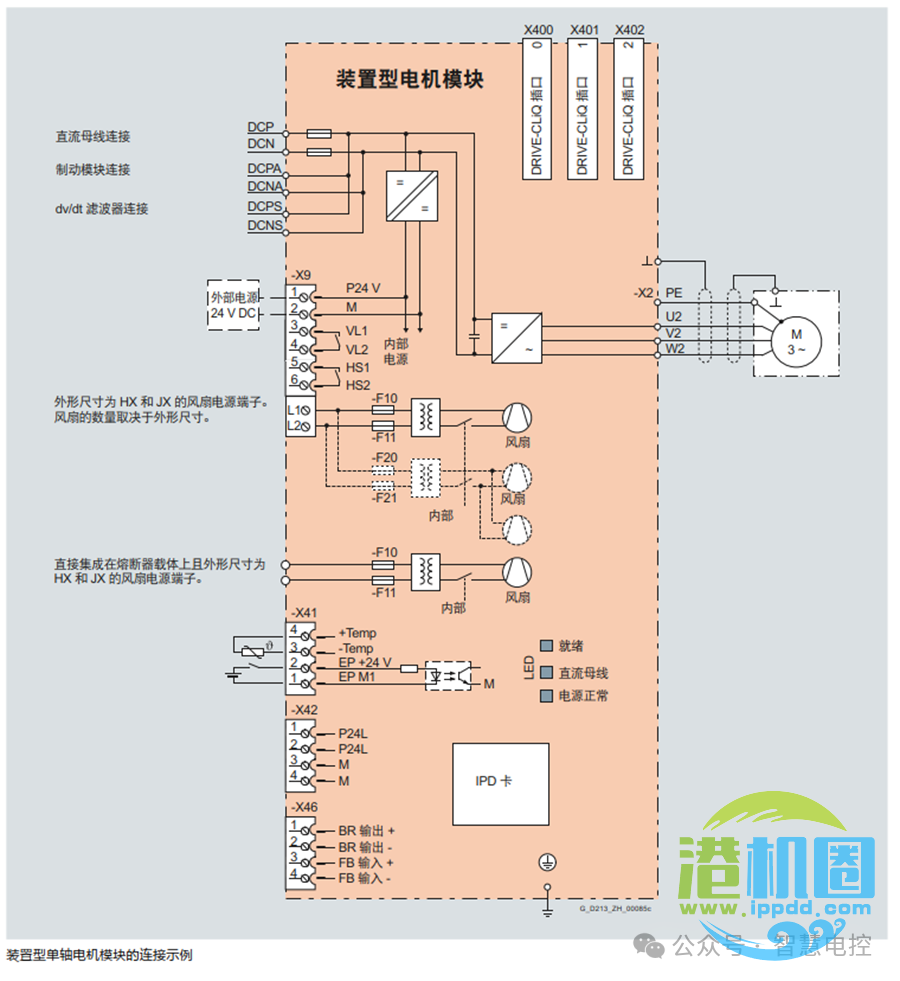
图9-4 装置型电机模块。
5.CF卡的选择
需要选择一块与CU320相匹配的CF卡,如图9-5。所有固件版本都是存储在CF卡。

图9-5 CU320 CF卡
二、编码器信号模块的选择
从图9-3和9-4的接线图可知, 逆变器只有DRIVE-CLiQ 插口,没有编码器接口,因此,如果编码器不是自带DRIVE-CLiQ 插口,则需要选一块编码器接口模块。根据编码器的信号,选择以下传感器模块:
SMC10:适用于旋转变压器(测速发电机)
SMC20:正弦/余弦波编码器
SMC30:HTL/TTL脉冲编码器。

图9-6 SMC30模块
三、总结
综合而言,需要根据场景选择CU310或CU320,注意选PN还是DP接口。需要配备CF和正确的编码器模块。
2026年5月17日
Twenty.起重机电气设计_驱动安全停止功能的设计(10)
一、 变频器安全停止的设计和选择
起重机械对安全运行要求很高,国家和国际标准都有相关要求,因为一旦发生事故,会造成很大的设备损坏,甚至人身伤害。为了安全运行,需要在发生紧急情况和非预期的运行时,能够及时停止运行。因此,设计需要完全符合国家和行业标准,对于出口业务,特别是欧美国家,还需要符合国际和相关国家标准。
IEC标准里面有IEC 60204-32, 国标有GBT-3811等标准, 国家基本使用的IEC标准,符合一种,另一种也就符合了。
在起重电气系统设计时需要符合起重安全规范,如设置急停开关,超行程限位开关,超速开关,防碰撞限位开关,停止限位和减速限位,这些将在后续文章中陈述。
起重驱动系统是为起重提供动力,出现危险情况需要及时停止。虽然在电气系统有停止设施,如关闭抱闸,断开起重开关,PLC向驱动系统发出停止指令,但是,在驱动系统本身,也要考虑安全停止,以满足在某些标准对SIL2/3的要求。
西门子SINAMICS系列变频器有集成安全功能/驱动内置安全功能 :安全转矩关闭(STO-Safe Torque Off)和安全停止(SS1-Safe Stop 1)。当安全转矩关闭动作时能够切断设备传动部件的供电,实现0类停机(非受控停机),即相当于切断从变频器至电机之间的电路。因为逆变器的开关元器件是IGBT,IGBT触发脉冲断开后关闭,也就不会向电机供电,从而使电机没有输出力矩,然后再通过抱闸将机构停止,势能消耗在机械抱闸,实现停机。
安全停止(简称SS1)以安全转矩关闭功能为基础,可实现设备1类停机。触发SS1后,传动装置将按照急停减速曲线(OFF3减速曲线)降速运行,设定延时结束后,设备切换至安全转矩关闭状态。
硬件接线图如 图10-1所示。由于SINAMICS系列是逆变器和控制单元(Control Unit)是分开的,因此,需要分别接线。 CU利用DI口,将需要启动STO的常闭信号接入DI0-7,再在CU中利用自由功能块进行编程,实现STO。在逆变器,将信号接入 Enable Pulse Terminales EP+和EP M端子。 请注意以上信号需要使用常闭触点信号,即低电平有效,是为了防止外部断线而需要启动功能时失效。
图10-1左上角淡黄色部分是控制单元(CU),其他阴影部分是逆变器(MM),它们之间通过Drive-CliQ通讯。
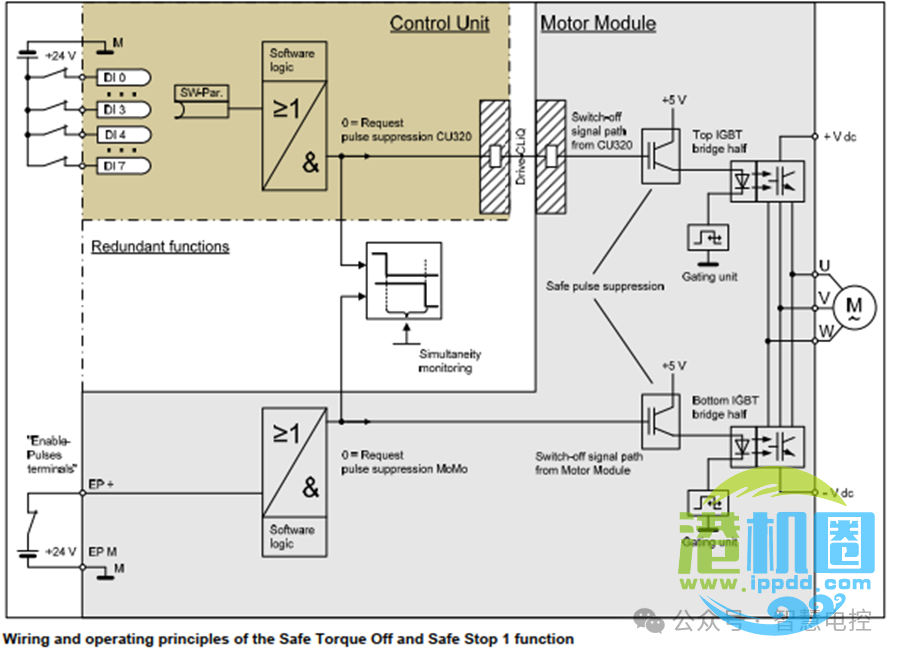
图10-1 STO和SS1硬件接线图
图10-2是在逆变器里面的STO功能图,与图10-1的硬件回路对应,即将硬件接线信号在功能图里面实现其功能。
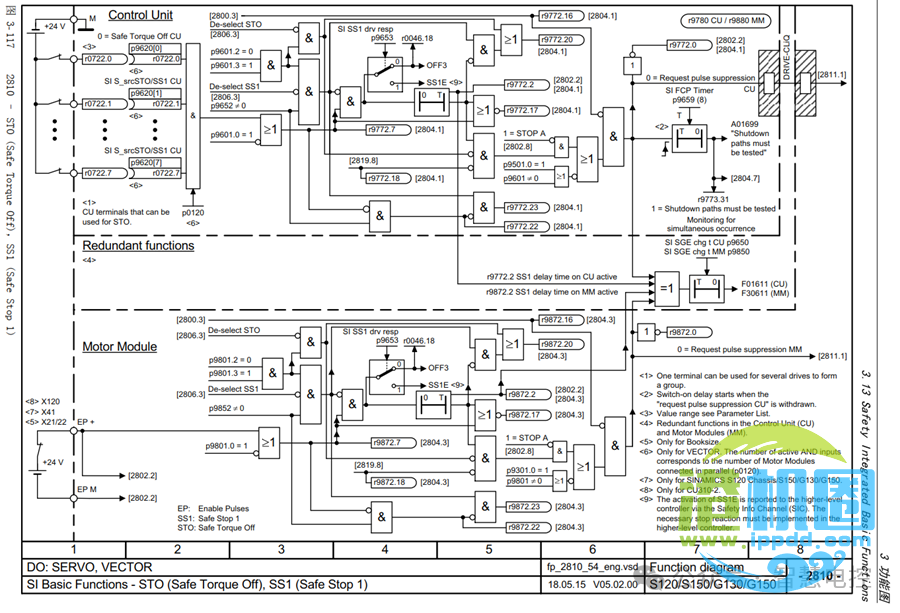
图10-2 STO功能图
在参数中通过以下参数设置实现STO功能。
安全力矩关闭(STO) 功能通过参数 P9601 使能:
1) P9601 = 1 (通过板载端子控制的基本功能)
2) P9601 = 8 hex(通过 PROFIsafe 控制的基本功能)
3) P9601 = 9 hex(通过 PROFIsafe 和板载端子控制的基本功能)
4) P9601 = 40 hex(由 TM54F 控制的基本功能)
5) P9601 = 41 hex(由 TM54F 和板载端子控制的基本功能)
从以上参数设置可知,STO可以通过自带的端子硬件输入实现,也可以通过扩展端子板TM54等实现;也可以通过程序实现,即在PLC程序将控制STO的信号放在控制字中,通过Profinet、Profibus、等传输到驱动系统的参数实现。
图10-2 是典型的西门子驱动系统BICO风格的功能图,与Masterdrive也是类似,不做详细说明,因此,熟悉Masterdrive就能很快掌握SINAMICS.
图10-3是STO信号关闭IGBT触发信号功能图,通过断开触发信号,使IGBT关闭,逆变器(电机模块MM)没有电流输出,从而关断输出力矩。
综合起来,还是通过内部信号来关断IGBT,达到电机断电的目的。那是否可以通过在逆变器的输出和电机主回路的输入之间增加接触器实现呢?我觉得可以,但起重很多大功率电机,需要的接触器很大,安装很占空间,也需要成本。在以前的观念里面,总觉得通讯和软件的方式来关断的风险来自通讯干扰和软件的瑕疵而导致不动作。个人觉得不用担心,现在通讯比以前稳定性强很多,通可以将通讯故障设置成停机,软件在实际中应用多年也不会有这种瑕疵。
有时也会遇到有些客户会严格要求有可视断点,不相信看不见的IGBT是电子开关,那也只能想办法说服他,说服不了就加接触器。不过接触器的断点也看不见。
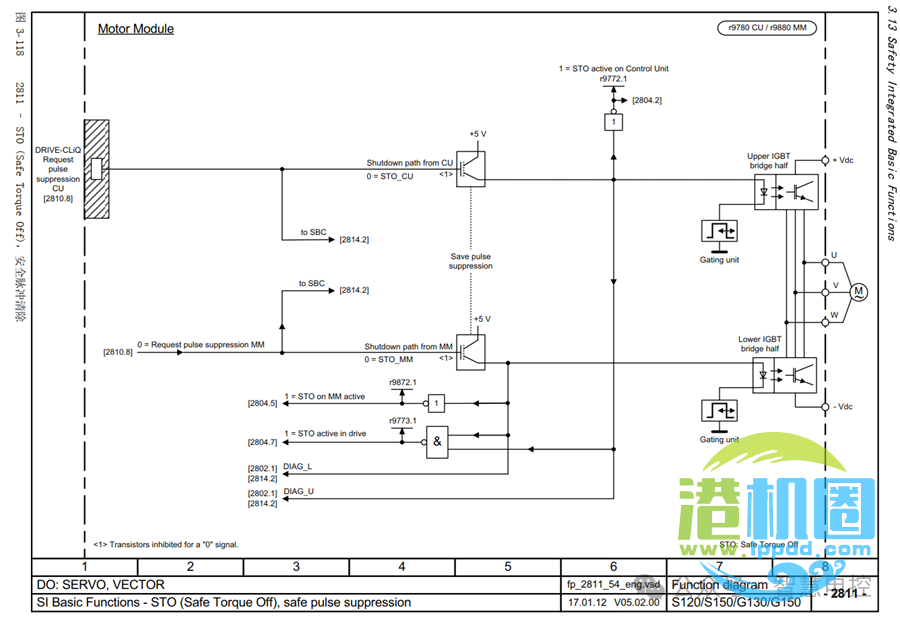
图10-3 STO 关闭IGBT
图10-4是Masterdrive的安全停车在逆变器内部实现的电路图,它是通过控制一个内部中继,这个中继的主回路是IGBT的触发电源,从而实现在硬件回路将IGBT触发信号关断。与SINAMICS实现同样的功能,一个是中继断开,一个是软件断开。这是通过硬件回路断开,算可视触点,但在逆变器里面,遇到较真的,小中继还是看不见断点。太较真的人分两种,一种是真认真,严格按标准要求,但知识体系没有及时更新;10几年前我们讨论过将可控硅和IGBT的开关纳入断点的范围,国标应该是更新了,需要进一步查实,这种情况可以找新国标来证明。另一种是故意找您麻烦,遇到这情况只能说运气差,好像没有特别的好方法;让其他人都同意只有他反对,少数服从多数?
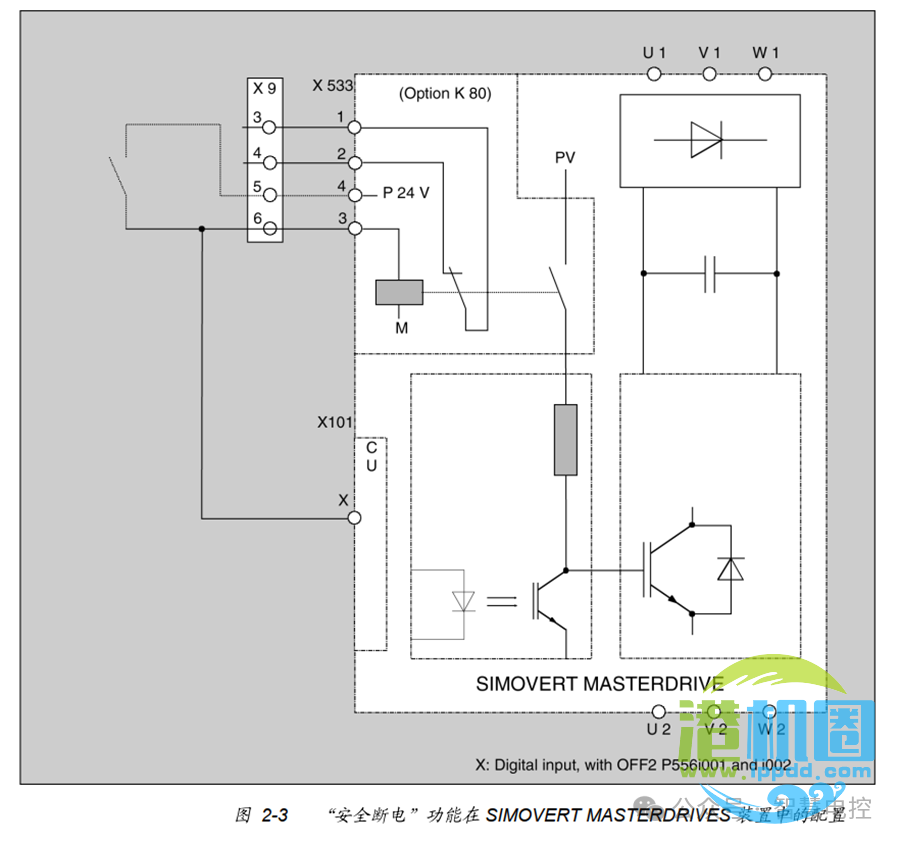
图 10-4 Masterdrive安全断电功能。
二、 变频器的停机方式(编程时考虑)。
目前变频器除了STO和SS1之外,还有3中停止方式:
1) OFF1: 电气停机,触发后变频器按设定的加减速时间停止,不是马上停止。用于正常操作的停机,如达到停止限位开关为止,以及不需要立刻停止的故障,如过热,冷却风扇负荷开关跳闸,反正过热,再过热几秒钟不会将故障扩大。
2) OFF2: 紧急停机,触发后变频器关闭IGBT,没有电流输出,功能与STO一致;适用于紧急停止,如急停开关动作,超速,超行程等等。既然与STO功能一致,是否多余的?多一层停止确保安全。
3) OFF3: 按设定时间停止。功能如SS1。如加减速时间是5秒,您可以将OFF3的停车时间设为0-5秒,假如设成0.5秒,电机会在0.5秒内停止,变频器会给电机一个反方制动电流,对电机冲击非常大!起重很多是大功率电机,要避免使用这功能,容易导致电机发热而缩短寿命,机械机构收到冲击,有时不是讲故障缩小达到安全,反而会将问题扩大。如900吨大型造船门机,上梁高度超100米,大车电机在地面大车机构,用OFF3停机,地面大车机构停止了,900吨负载在将近100米钢丝绳下挂着,负载来回做钟摆运动;大梁是通过刚腿和柔腿的刚性传递上去停止,这么大惯量的物体,很可能停不下来而倾翻,就像我们快速跑,脚和小腿停了脑袋没及时停下来从而脑袋磕在地面。
以上停止方式需要结合起重机具体机械结构来设计,不能只是从理论出发。如造船门机的大车停车,最好用OFF1停车。起重机所有机构都不使用OFF3,防止发生事故。
三、 总结
利用好变频器的安全停车功能,实现变频器的运行保证安全。运用安全标准的同时结合实际工况。读好书,不是读死书死读书。
2026年5月24日
Twentyone.起重机电气设计_驱动系统的刹车设计(11)
一、变频器刹车功能的使用
起重机的起升机构和俯仰机构是位能负载,造船门机的主梁一般有5度的坡度,也算是位能负载,只是势能小一些。对于位能负载,刹车控制非常重要。以起升机构为例,当起吊负载在半空中,如果在电机没有输出能足够支持负载的力矩之前刹车打开,负载将在重力作用下往下坠,形成极大的安全隐患。因此刹车控制非常重要。所以,刹车打开之前,需要确保逆变器工作正常,而且具备刹车打开的条件,即电机已经励磁,而且有足够的力矩输出以抵抗重力的作用。
图11-1是刹车控制示意图,从Teminal 1和2过来的信号,允许刹车打开,则导通 TB+和TB1, 信号输出到BR+和BR-,示意图是直接控制刹车,在起重实际应用,这是刹车打开的条件之一,通过BR+和BR-驱动一个24VDC 线圈的中继,中继的主触点信号串入刹车接触器的线圈回路,作为允许刹车继电器闭合的连锁条件。驱动系统同时通过状态字将允许刹车打开的信号通过Profinet/Profibus送到PLC, 作为连锁信号之一,PLC程序综合所有条件,判断是否允许刹车打开,如条件具备,通过PLC DO 将刹车继电器吸合,刹车打开。控制字如图11-7。
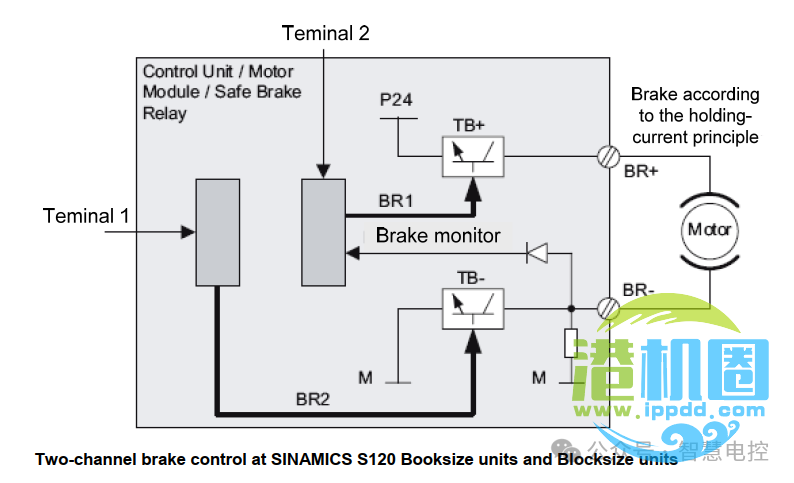
图11-1 刹车控制示意图
实际的接线图示例如图11-2和11-3, 通过端子-X46-1 BR Output+,-X46-1 BR Output-,如上一段陈述的那样接入刹车继电器控制回路。如果使用单电机/双电机小功率模块,接线图可能略有不同,但有相同功能的端子。
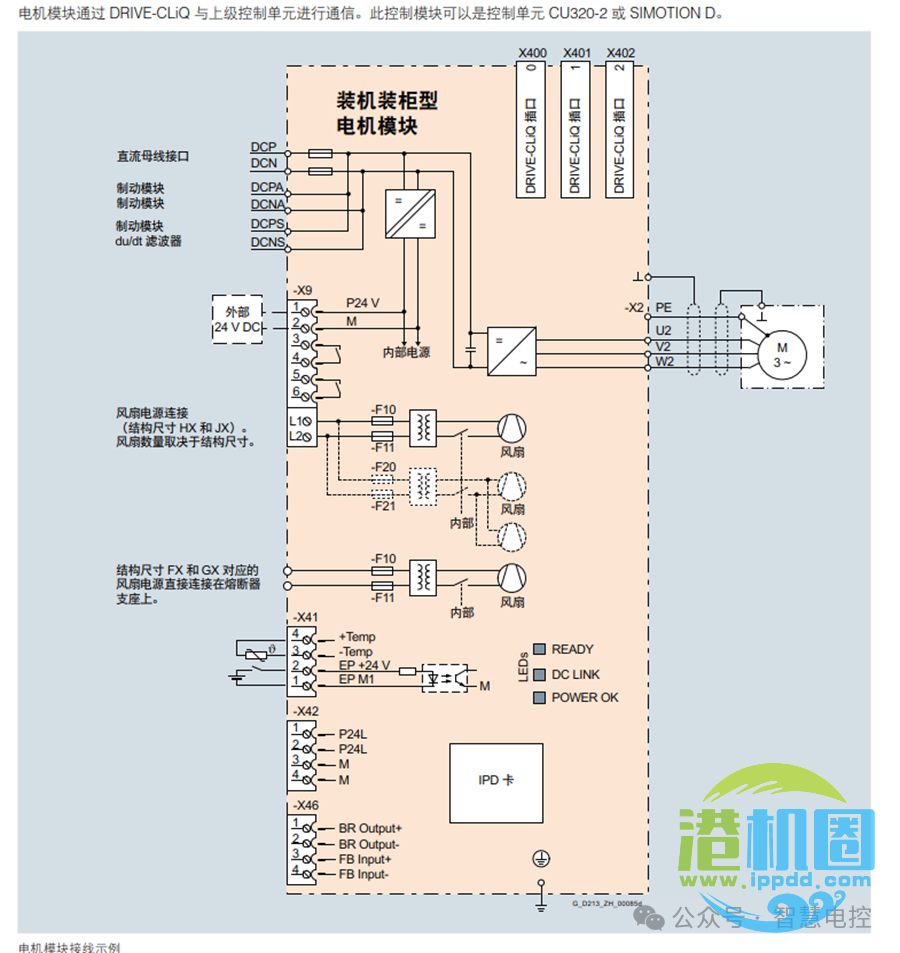
图11-2 装机装柜型电机模块接线图(直流进交流出)
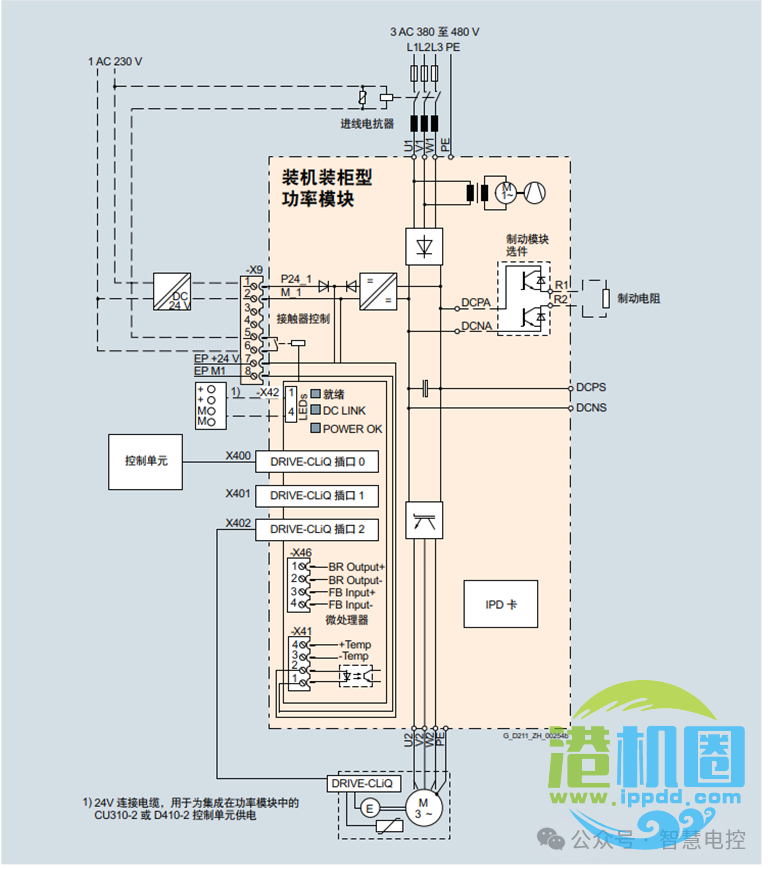
图11-3 装机装柜型功率模块接线图(交流进交流出)
图11-4是CU内部判断刹车打开和关闭的逻辑运算。右上部分的Close brake(Internal)和Open brake(Internal)送入图11-5的左边,再通过一个RS触发器,生成最终的刹车打开和闭合的控制信号,
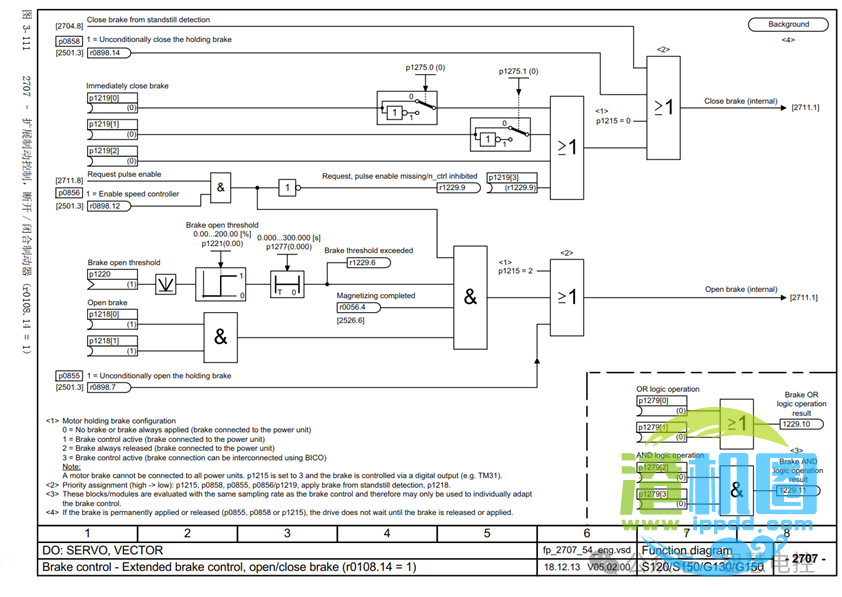
图11-4 刹车控制功能图(一)
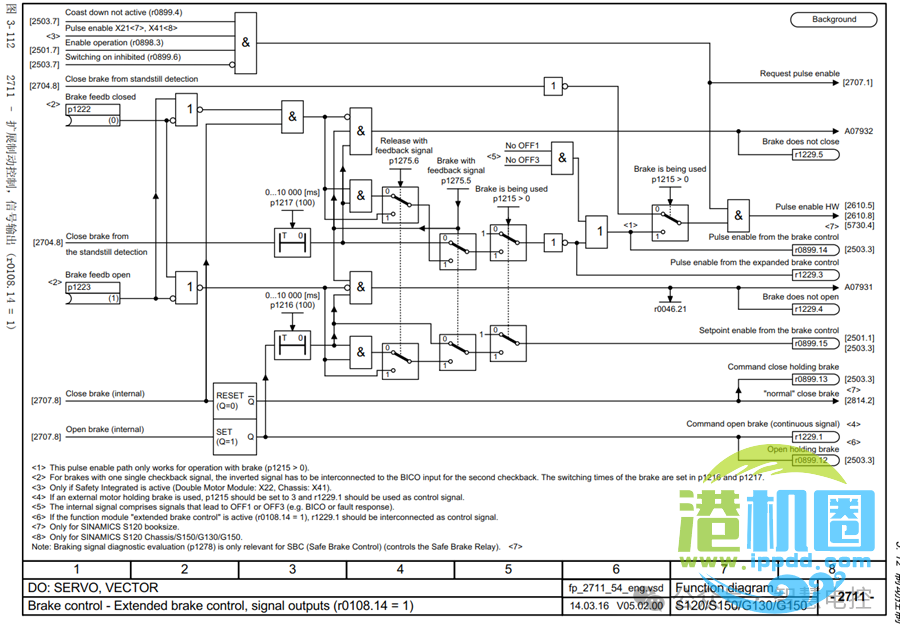
图11-5 刹车控制功能图(二)
图11-6是详细的刹车逻辑图,即图11-1示意图的功能实现。
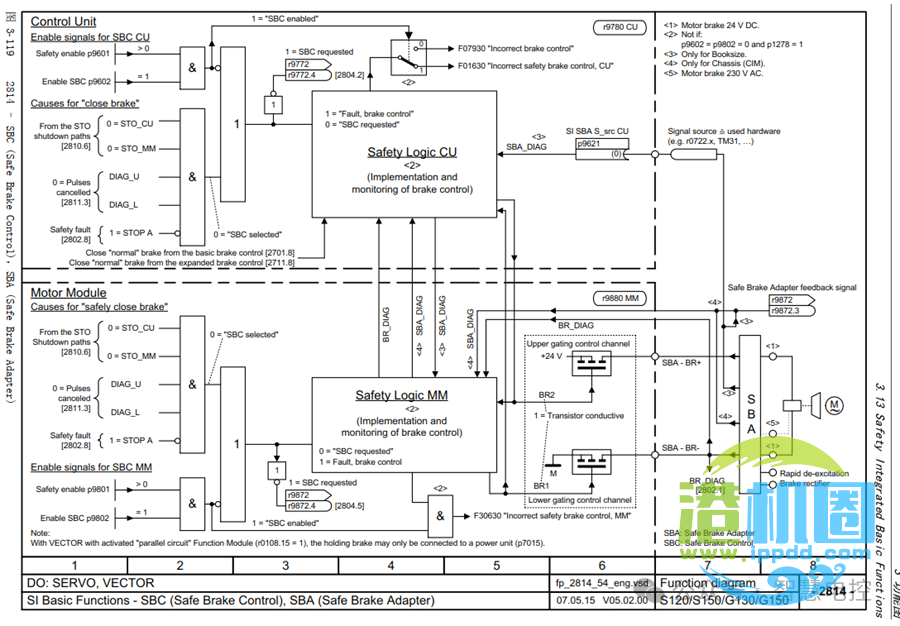
图11-6 刹车控制功能图(三)
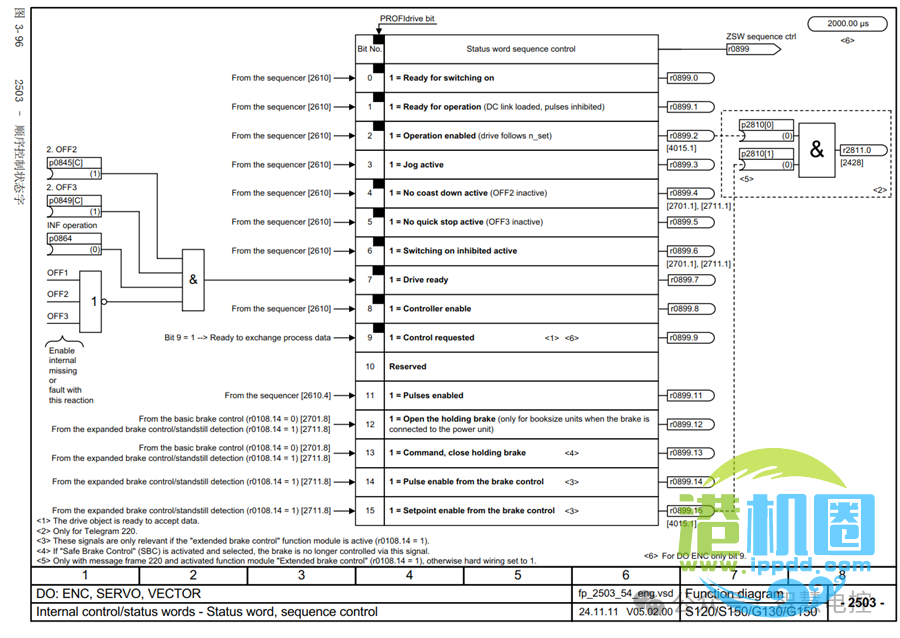
图11-7 S120 状态字
要看懂S120 功能图,一开始需要花点时间熟悉其中的规则,如BICO技术。功能图实际上与我们的程序梯形图很类似,初学者也能很快掌握。虽然功能图很多,看起来复杂,个人认为,西门子驱动系统是最开放最灵活的系统,使用之后您会感觉到越用越好用。也不用担心里面太复杂,太多参数需要设置,实际上很多参数已经做好出厂设置,不实现特殊功能就能直接使用。
二、如何关闭刹车
停车的时候,刹车同样需要正确控制,为了避免对电机齿轮箱等机械机构的冲击和减少刹车片的磨损,只有速度降到低速之后刹车才关闭;通常我们设置在速度减速到全速的0.5-3% 时刹车闭合;然后将电机的去磁时间设置在1.5秒,即电机还有足够支撑负载的力矩输出,确保刹车安全闭合。
三、刹车实现的其他方法
以上是介绍通过逆变器固有的接口实现刹车控制。也可以通过CU的DO实现。如图11-8,将r1229.1/r0899.12接入DO,如P0738=r1229.1/r0899.12,P0728.8=1,则刹车打开信号送到DO8,在-X122.9和11之间接一个24 VDC中继,作为刹车控制回路的连锁信号。
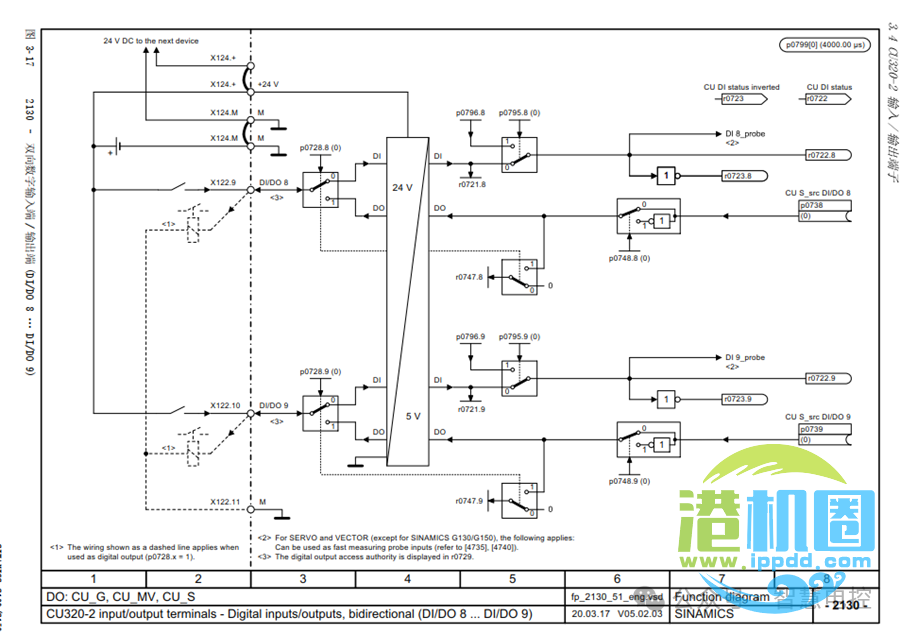
图11-8 CU DI/DO
四、溜钩-起动脉冲
在起升机构带载运行的初始阶段,如果电机的初始力矩不够,则在刹车打开之后约100毫秒,负载会先下坠,然后再加速上升或加速下降,这时操作人员会明显感觉起重机的振动,这种现象俗称溜钩。
为了防止溜钩,必须做到刹车打开时负载不下坠,电机从静止状态按斜波函数发生器设置的速度曲线加速。这就要求刹车打开时电机输出的力矩刚好等于负载的重力产生的负载力矩。当出现溜钩时,必须增加电机的输出力矩。通常我们采用以下两种方法来实现:
1).延时打开刹车的方法。
当 PLC接收到驱动系统允许刹车打开信号之后,不是立刻打开刹车,而是延时100-300毫秒之后才发出刹车打开信号;延时时间在调试时通过多次测试,取有最佳效果时的值设置在PLC程序里面。
本方法简单实用,但效果不一定是最佳,延时过短则还会有轻微溜钩;延时过长 则电机短暂堵转,刹车打开时有冲击力矩输出。而且负载的重量不同要求延时时间有差别。因此对要求高的场合需要采用下面的方法。
2).起动脉冲。
起动脉冲是指在刹车打开时,给电机一个附加的力矩输出,使电机的输出总力矩等于负载力矩。其步骤如下:
1)在起升机构停车时,PLC CPU读取刹车闭合瞬间的电机电流值,保存在PLC程序里面;
2)将保存的电流值乘以一个量化系数K (K=0-1)生成起动脉冲量T1;
3)将T1由PLC通过通讯网络传输到变频器;
4)在变频器中用自由功能块将T1转化成起动脉冲值T2;
5)将T2 连接到变频器的附加给定值P438, 如图2-5所示。
这样起动脉冲完成,调试时调节系数K值达到最佳效果。
从现场调试得到的结果来看,效果取决于电机性能,2004年使用的国产电机相应慢,启动脉冲投入之后效果一般;但西门子电机效果非常理想。后来没怎么用过国产电机,也许现在性能已经提高。
五、总结
利用好变频器的刹车功能,实现起重安全运行。这是其中一个环节,虽然重要,但不是唯一环节。
本篇稍长,主要截图较多,感谢耐心阅读!
2026年5月30日
Twentytwo起重机电气设计_驱动系统制动单元和制动电阻的选择计算(12)
一、变频器为什么要配置制动单元和制动电阻?
在选择独立变频器(单传动系统)时,由于整流部分只有整流功能,不能回馈,对应于对西门子SINAMICS S120驱动系统是BLM,当电机处于发电状态时,需要将产生的能量消耗,否则直流母排电压会持续升高,能量无法消耗而出故障。
在起重机系统,起升机构是位能负载,当下降时电机处于发电状态。俯仰机构在下降时也是进入发电状态。小车和大车是平移机构,但在停车时处于电气制动阶段,也处于发电状态,特别是在大车顺风移动时,在风力作用下很可能一直处于发电状态。小车在高速运行时,由于负载前后摇摆,当负载在运行方向的前方,会拽着小车往前,进入发电状态。造船门机的主大梁一般有5°的角度,当小车从中间位置往刚腿和柔腿运行时,如果轻载,也会有势能转化为动能;会发电。
综上所述,在配置没有回馈功能的变频器时,需要增加制动单元和制动电阻,消耗发电产生的电能,否则变频器由于能量无法消耗而导致母排电压升高,进而容易老化。缩短使用寿命或损坏。
从降低电费的角度,需要选择带能量回馈的变频器,而且国家的碳中和和碳达峰(双碳)都有这要求。而且从我们工程师角度,总是需要设计性能优越的系统。采用带制动单元和制动电阻的变频器,初期价格会便宜,由于电能消耗大,运行成本高。可以核对一下初期投资在多长时间内通过节约的电费能够收回投资。
有些起重机只能采用整流单元加制动电阻的形式,如柴油驱动的RTG和浮吊,能量无法回馈,只能通过电阻消耗。
为了节能,以前有采用增加超级电容,当起升下降时将多余的电能储存在超级电容,电动状态再释放使用。但超级电容贵,而且使用寿命有限,从节能考虑是一个挺好的选择,从经济考虑还是不合算。前几天在一个成柜公司车间看见配置电池组,如果电池组能实现快速充放电,价格也合适,可能是一种好的选择。
二、制动单元和制动电阻的计算
1.制动单元的计算
制动单元的功率有4个功率数据,如图12-1所示:
PDB: 持续功率,如S1工作制,长时间工作允许的输出功率。
P15: P15= 5 x PDB在90秒周期内允许的15秒的输出功率。
P20: P20= 4 x PDB在90秒周期内允许的20秒的输出功率。
P40: P40= 2 x PDB在90秒周期内允许的40秒的输出功率。
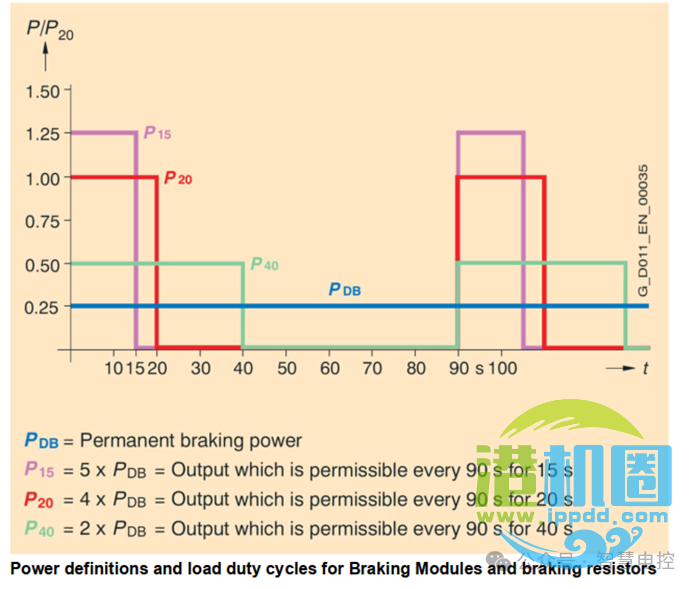
图12-1 制动单元和制动电阻的定义功率和工作制
西门子S120制动单元只有这几种规格 PDB=1.5 KW, 5 KW, 25 KW, 50 KW。如果需要超出50KW的制动功率,只能将几个制动单元并联使用,提高制动功率。
制动单元和制动电阻的功率计算,首先要计算周期内的平均功率 Pmean, 需要分三种情况:
1)起升机构。
起升机构在下降过程中一直处于发电状态,则Pmean = (m * g *v)/60 ,与起升电机的功率计算相似,区别是发的电会消耗一部分在克服机械传动系统的摩擦上面。实际情况由于负载变化而导致Pmean变化,但设计时只能考虑最大允许负载的情况。简单的计算可以取Pmean = 起升电机额定功率* 电机效率* 机械传动系统效率, 通常偏大,因为电机功率是一个系列,选的电机通常比计算功率大一些。
2)俯仰机构
俯仰机构在下降过程中,功率逐步增加,一般俯仰电机的功率已经考虑这变化的因素,因此可以采用Pmean = 俯仰电机额定功率* 电机效率 * 机械传动系统效率;或向OEM将计算功率数据要过来,对数据进行加权平均,得出Pmean 。
3)小车和大车机构
小车和大车机构只有在停车制动的时候,处于发电状态,因此
Pmean =(n * Prated * 0.5 * t)/ T
其中:
n:电机数量
Prated:电机功率
t:减速时间。
T:运行周期。小车运行周期可以根据行程和速度计算,大车有些不确定,本身就不常用。
0.5是系数,在减速过程中功率从额定到0,取0.5刚好平均值。
计算以下数据:
PDB ≥ 1.125 * Pmean
如果满足Ppeak> 5 * k * PDB,则取 PDB≥1.125 * Pmean
如果不满足Ppeak>5 * k * PDB,则取 PDB≥Ppeak/(5 * k).
K的取值范围如下表12-1:
表12-1,k取值范围。

根据以上计算出PDB之后,再根据产品目录选择相应的制动单元,如果功率不够,则选几个并联使用。并联使用是每个制动单元有独立的制动电阻,即制动单元和制动电阻是成套。
2.制动电阻的计算
R= U2/PDB,其中U是制动单元开通的阈值。
如果计算的制动单元数量太多,并联也就很困难。特别是大功率浮吊,制动功率可能好几百千瓦,西门子没有大功率制动器,可以采用整流+直流母线+电机模块,其中用一个电机模块当做制动单元使用,出线接三相对称的电阻,达到将电能消耗的目的。
三、总结
制动单元和制动电阻选择不合适,容易损坏制动单元和变频器母排过电压。在长时间发电的场景不是和适用。
2026年06月06日
