装卸作业是集装箱码头的核心工序,也是集装箱码头人机交互及流程交互中最为复杂的工序,其执行效率的高低直接决定集装箱码头的竞争力。但是,随着近年码头生产规模的持续扩大,其机械密度、人员密度及集装箱密度均持续提升,装卸作业过程中人、机、物之间相对位置的高频快速切换变得愈加复杂,随之产生大量事故,具体有:在装卸设备行驶过程中,装卸设备之间、装卸设备与拖运设备之间及装卸设备与码头设施之间的撞击事故;在装卸设备作业过程中,装卸设备与集装箱之间的撞击事故(俗称“打保龄”)、装卸设备与拖运设备之间的拖曳及砸压事故以及装卸作业禁行区域侵入事故;等等。以某海港为例,自2017年至2019年2月,共计发生装卸设备行驶过程中撞击类事故48单(含3单装卸设备之间相撞事故)、装卸设备与拖运设备之间的拖曳与砸压事故141单、装卸作业过程中的“打保龄”事故5单、装卸作业禁行区域侵入事故2单,以上事故造成的直接经济损失达120余万元,事故导致的设备停产、人员伤害及社会纠纷所产生的损失更是难以估量。
集装箱堆场的事故高发地有拖车道区域、RTG及RMG(以下简称“RTG”,包含RTG及RMG)大车行走区域、RTG起升区域及RTG小车行走区域。为了解决这些区域内的拖车挂起、RTG大车相撞、小车吊具砸车头等安全问题,在场桥建立基于激光雷达的“大车侧子系统+小车顶平台子系统”双平台方案,在各机构运行区域构建立体电子防护网,通过与场桥PLC控制系统的联动,实现拖车、集装箱及外部环境等异常情况的高速识别、高速信息处理以及实时的辅助作业,实现场桥的安全、高效作业。大车侧子系统和小车顶平台子系统均采用平台化理念进行设计,通过集数据采集、处理及数据交互为一体的平台化功能,不仅可以实现与RTG机上PLC控制系统之间的相对独立运行,以避免系统间的交叉影响,还可以确保系统具有充分的开放性及扩展能力。由于需要承担涉及设备和人身安全的监控工作,系统具备完整的设备故障自检能力,并与RTG的PLC控制系统相配合,实现在关键设备发生故障的情况下,各项安全监控功能导向安全的故障处置。
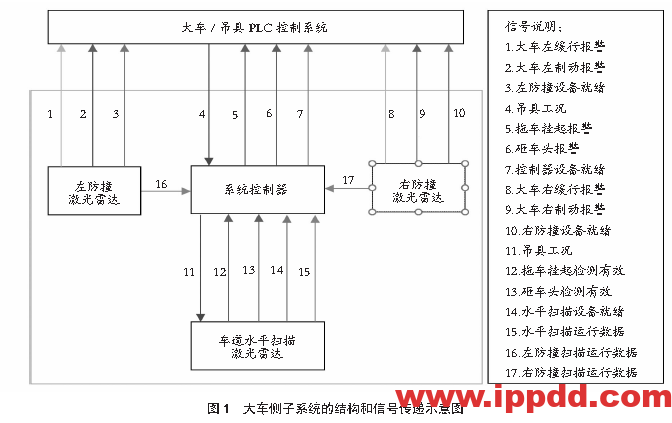
1.1 大车侧子系统
大车侧子系统的结构和信号传递示意图见图1。该子系统共设计3台激光雷达,分别承担RTG大车行走方向和拖车道划定区域内的环境信息(空间位置信息)测量。车道水平扫描激光雷达实现外拖车防挂起、防砸车头和RTG作业贝位对位等3项功能。大车左/右防撞激光雷达实现RTG大车防撞功能。系统控制器为基于嵌入式技术的核心控制器,其主要功能为采集、分析、计算及存储激光雷达测量数据,监控激光雷达运行状态,与RTG机上PLC控制系统之间的I/O数据交互和数据处理及控制等。
1.2 小车顶平台子系统
小车顶平台子系统的结构和信号传递示意图见图2。该系统共计设置2台激光雷达,分别承担RTG小车前进方向和后退方向的集装箱堆存轮廓测量。集装箱堆存轮廓包含作业空间轮廓检测、作业空间轮廓信息识别、水平防碰箱和垂直防碰箱等4项功能,其中作业空间轮廓信息识别又包含堆场箱列轮廓合成和作业箱实时工作面识别等2个重要的信息识别算法。系统控制器为基于嵌入式技术的中心控制器,其主要功能为激光雷达测量数据的采集、分析、计算及存储,激光雷达运行状态的监控及存储,该子系统与RTG机上PLC控制系统之间的I/O数据交互、数据处理和控制等。

该子系统可以实现在发生关键设备故障的情况下防打保龄功能的导向安全处理。
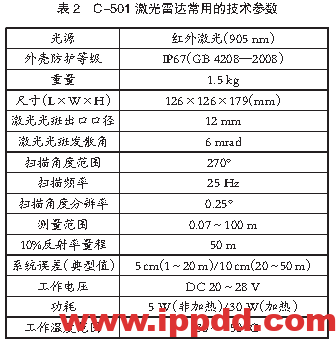
方案选用的激光雷达是北京飞思迈尔光电科技有限公司的产品,型号为C-501。它是一款具有较高空间分辨率的测量型单层2D扫描激光雷达,既支持室内应用,也支持室外应用,对在静态安装条件下的形状识别和体积测量应用具有较好的性能。
2.1 激光雷达测距仪原理
C-501激光雷达的工作原理是通过与1个原始发射光路夹角为45°的反射镜对测距激光脉冲进行90°的偏转,而反射镜被电机带动旋转,使得实际的测距光轴分布在与旋转轴垂直的扫描平面上,且测距方位角与电机旋转方位角相同,从而实现二维光学扫描,并基于飞行时间测量来实现激光测距。
同时,C-501激光雷达具备多次回波分析能力。多次回波与单次回波的区别在于是否对同一束激光脉冲发生多次反射。多次回波是指激光雷达发射激光脉冲接触到障碍物之后,部分脉冲会反射回雷达并被记录,而剩下的脉冲会继续传播,当遇到另一个障碍物或者反射到原障碍物的另一部分之后再继续反射,直至脉冲里的能量用完为止,多次反射使得激光雷达能接收到多个反射信号,这就是多次回波。多次回波分析能力保证其在雨雾、烟尘工作环境下也能完成工作。
一般来说,物体表面光线不足,激光在物体表面的反射率就不高,尤其是对表面坑洼不平的物体,激光雷达的距离测量就会有误差,从而不能达到精准定位的效果。激光雷达发射的激光遇到物体发生反射时,会在物体上留下光斑,激光雷达距离物体越远,光斑就会越大。如果物体的大小小于光斑的直径,光斑不能全部覆盖在物体上,此时激光的能量就有一部分会逸散,当激光照射到物体后反射回激光雷达的能量小于激光雷达能接收的最小能量时,激光雷达就无法测量到物体的距离。但C-501激光雷达具有多次回波分析能力,它会使得激光的能量分散,一部分激光照射到物体表面,一部分激光照射到物体周边环境,当从物体表面反射回激光雷达的能量太小,无法测量物体的距离时,C-501激光雷达会把物体周边环境与雷达的距离当成物体与雷达的距离。
C-501激光雷达在25 Hz的扫描频率下,能达到0.25°的角度分辨率,其12 mm的基础光斑口径和6 mrad的光斑发散角保证一定距离范围内即使是快速运动的细小目标也能够被发现和追踪。C-501激光雷达具有良好的测量精度:在1~20 m范围内,其测量误差在5 cm内,测量波动控制在2 cm内;即使是在20 m以外,其测量误差也在10 cm内,测量波动控制在4 cm内,能够满足场景测量和定位引导等应用的需要。
C-501激光雷达使用特定的网络报文,通过以太网向用户提供固定扫描频率的二维极坐标形式的扫描数据,表示的是物体与雷达之间的距离和物体与雷达之间的相对角度。C-501激光雷达的最远测量距离是100 m,在反射率只有10%时,最大量程是50 m,扫描角度的最大范围是-45°~225°。C-501激光雷达的扫描范围见图3。

2.2 激光雷达测距仪应用接口和参数
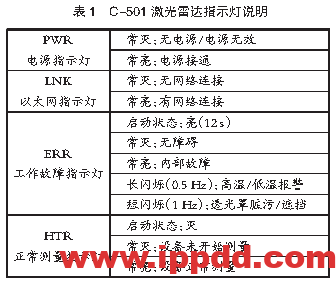
C-501激光雷达前面板上的指示灯表示激光雷达的当前状态。前面板上有4个指示灯,分别为PWR、LNK、ERR、HTR。PWR是电源指示灯,LNK是以太网指示灯,ERR是工作故障指示灯,HTR是正常测量指示灯。C-501激光雷达指示灯说明见表1。C-501激光雷达的接口见图4。当其在以太网网络连接稳定的正常工作状态下,PWR、LNK、HTR指示灯是常亮状态。
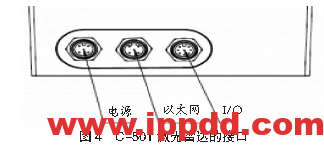
C-501激光雷达提供3个接口,均是M12型电缆插头,该插头在工程中较为常见。电源的接头是5芯M12(B型)公插头;以太网的接头是5芯M12(A型)公插头;I/O口的接口是8芯 M12(B型)公插头。C-501激光雷达常用的技术参数见表2。
系统在以下5个方面进行为期4个月的现场试验。
3.1 拖车道防挂起
针对不同箱型,分别测试在1个锁头或2个锁头(已包含3个锁头或4个锁头均未解锁的情况)未解锁情况下,系统的挂起点识别能力和防护功能执行能力,试验项目覆盖日常作业中的所有36种工况。具体测试流程如下:
-
吊具着箱闭锁后,根据PLC提供的箱型尺寸信息,调取设定的安全防护区域。
-
吊具带箱起升0.9 m,激光雷达水平扫描车架和箱底之间,扫描到障碍物即判断为集装箱和车架钩挂,强制停止继续起升,以防止拖车被吊起。
3.2 防砸车头
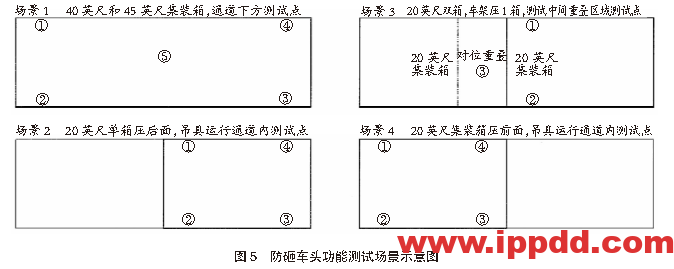
按不同场景布置场地,RTG吊具抓20英尺、40英尺及45英尺集装箱,下放吊具,在场景测试点位置使用金属杆模拟车头,验证吊具下降至10 m处是否会执行停止作业防护,系统测试试验覆盖日常作业中的4种场景。防砸车头功能测试场景示意图见图5。
3.3 大车防撞
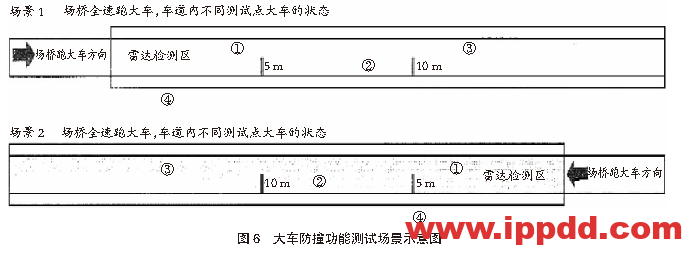
按2个场景分别测试不同测试点的安全防护情况,测试点使用金属杆模拟车头,垂直立于地面,RTG全速跑大车,分别观察大车行驶至距离测试点10 m时是否启动限速防护(限速至10%)、大车行驶至距离测试点5 m时是否会启动大车制动防护。大车防撞功能测试场景示意图见图6。
3.4 RTG作业贝位对位
RTG行走至待作业贝位附近,大车减速运行,激光雷达扫描正前方最近的一列集装箱,根据吊具尺寸,校准对中偏差,通过场桥驾驶室内显示屏显示偏差数值,指引司机箱区对位。
3.5 系统全天候及抗干扰作业能力测试
方案所选用的激光雷达需满足全天候作业的要求,因此项目组设置系统全天候及抗干扰作业能力测试,具体测试内容及方法如下:
-
不同气象条件下系统作业能力测试。分别观察系统在雨天、高温、夜间和白天强光下的运行情况。
-
激光雷达测距仪雨水抑制能力测试。在系统作业过程中通过人工泼水至激光雷达遮光幕,观察遮光幕水滴挂珠情况和相应的测量数据处理情况。
-
激光雷达测距仪强光照射抗干扰能力测试。在系统作业过程中使用巡逻车强光照射激光雷达设备,观察强光对系统测量数据的影响情况。
-
激光雷达测距仪电磁辐射抗干扰能力测试。在系统作业过程中通过将对讲机放置在雷达防护罩上并进行呼叫通话,观察电磁辐射对系统测量数据的影响情况。
经过4个多月(防挂起等4项功能投入试运行4个多月,防打保龄功能投入试运行2个多月)的系统功能测试及试运行,系统测试结果如下:
-
拖车道防挂起保护。经场景测试箱底钩挂触发保护后,系统能及时停止吊具起升,可有效保护车架未开锁时不被场桥误吊起。
-
拖车防砸车头保护。经场景测试不同箱型,触发保护后,系统能及时限制吊具在11 m处停止下降,停止后的箱底位置距地面在6 m左右,此高度可以有效保护拖车车头不受伤害。
-
场桥道大车行走防碰撞保护。经在场桥行走大车方向摆放障碍物,在触发保护后,系统能及时在10 m距离处减速,5 m距离处停车。
-
RTG作业贝位对位。系统可在大车行驶过程中精确测量RTG吊具中心与本贝位箱列中心之间的偏差距离及方向。
-
箱区防打保龄。经场景测试,激光雷达测距仪能较好地识别到箱区内的堆箱高度、列与列之间的宽度、吊具的运行位置,在小车/吊具运行通道内遇到障碍箱时,系统能及时对小车机构/起升机构进行限速,可以有效保护因司机操作失误引起的撞箱、砸箱引发的打保龄事故。
该系统针对集装箱堆场作业过程中可能发生的安全隐患进行有效、实时的防护,对场桥控制进行有效的辅助导引,系统地解决了集装箱堆场作业的安全问题。
本篇文章来源于微信公众号:港口技术安全
