引言
introduction
本文是一篇综合性非常强的文章,从PLC输入输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusTCP通信协议及上位机编程实现最终控制,涉及知识面比较广,能够让我们很好地将所学知识结合起来。
采用西门子TIA Portal V15编程软件编写运动控制程序,实现PLC(S7-1200系列:CPU1214C DC/DC/DC )对步进电机的控制,再通过编写ModbusTCP程序,将控制地址进行映射,从而方便上位机(VS 2019开发)与PLC进行通信,最终实现步进电机的运动方向、速度及距离的灵活控制。
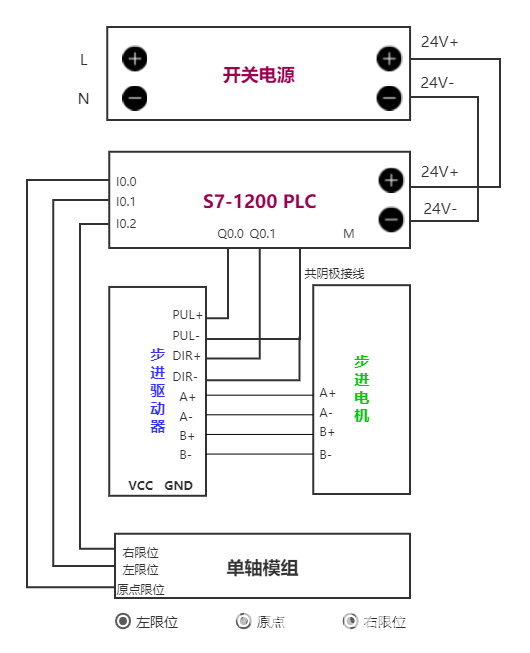
涉及硬件:开关电源、S7-1200PLC、步进驱动器、步进电机、单轴模组、限位开关
涉及软件:TIA Portal V15、VS2019、ModbusPoll(用于测试通信)
04
PLC编程
PLC programming
步 骤
操作
说明
1
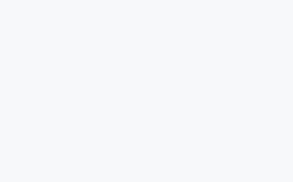
通过博图软件创建一个新的PLC项目,
根据硬件型号插入新设备,这里为
CPU 1214C DC DC DC
2
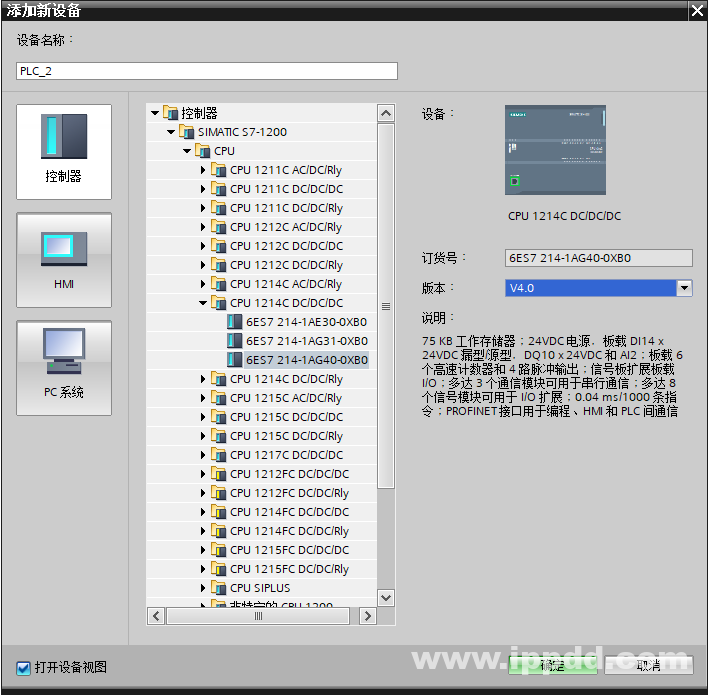
双击PLC的以太网口,设置IP地址,
这里设置为192.168.2.210
3
双击CPU,在脉冲发生器PTO/PWM选项中设置信号类型为PTO,脉冲输出为Q0.0,方向输出为Q0.1
4
新建一个工艺对象,名称为轴1,通过基本参数>驱动器,设置脉冲输出为Pulse1
5
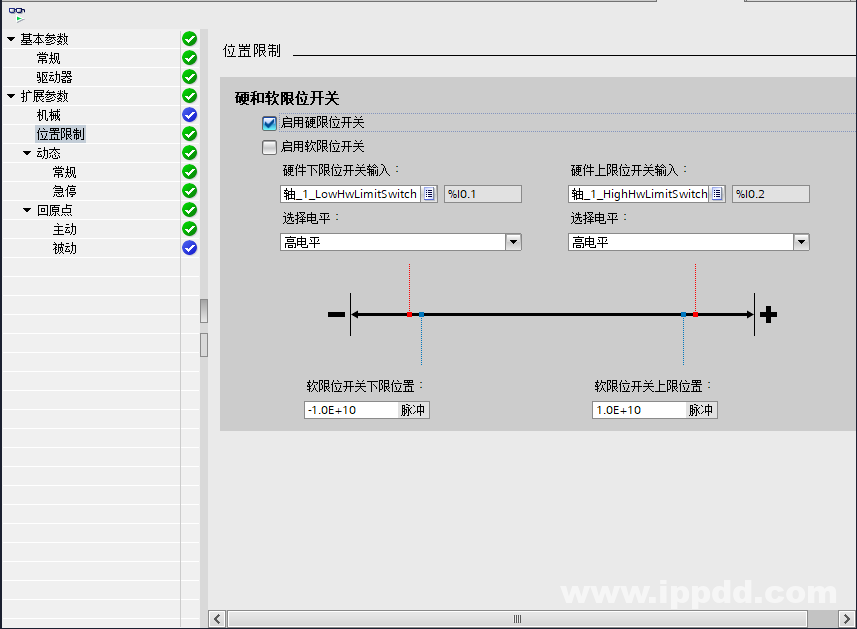
通过扩展参数>位置限制,设置上下限位分别为I0.1和I0.2
6
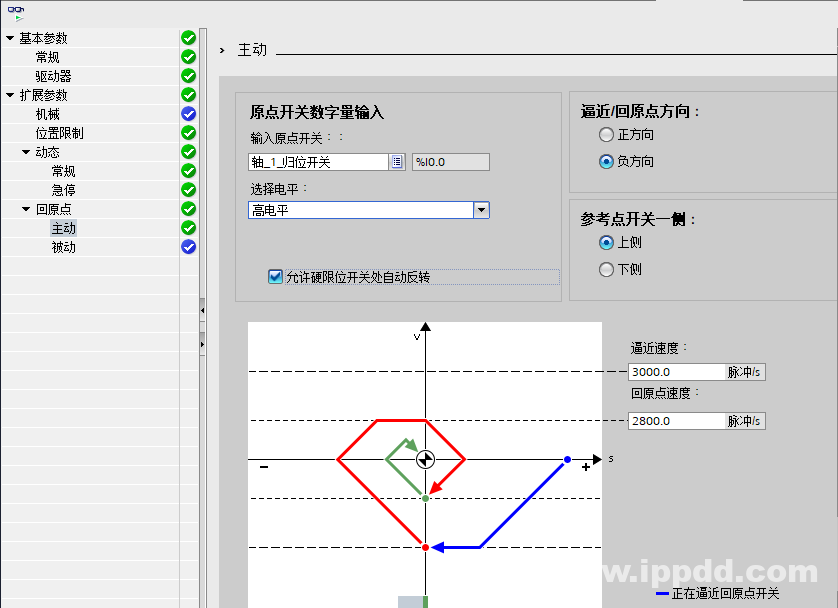
通过扩展参数>回原点>主动,设置原点开关为I0.0
7
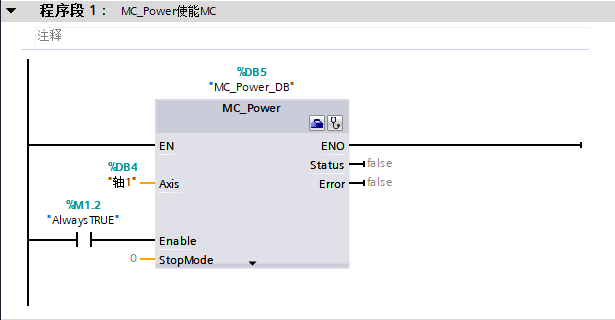
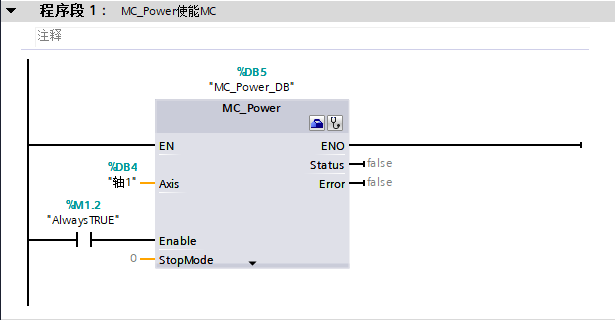
程序段1,调用MC_Power使能,各个引脚填写如图所示,其中Asix选择轴1
8
程序段2,调用MC_MoveRelative,各个引脚填写如图所示,该程序段主要用于执行相对运动
9
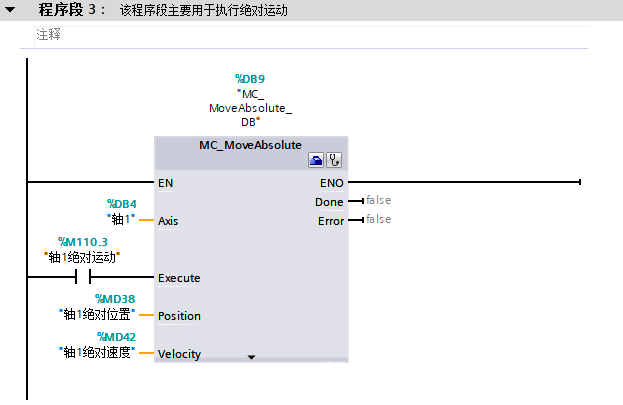
程序段3,调用MC_MoveAbsolute,各个引脚填写如图所示,该程序段主要用于执行绝对运动
10
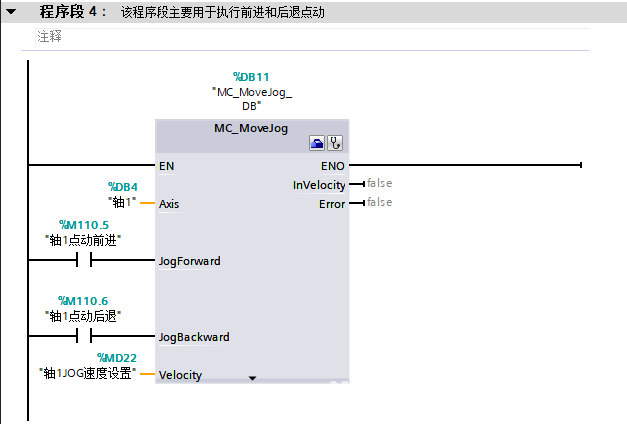
程序段4,调用MC_MoveJog,各个引脚填写如图所示,该程序段主要用于执行前进和后退点动
11
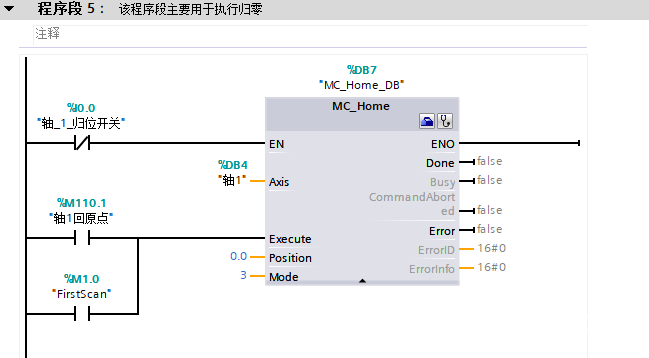
程序段5,调用MC_Home,各个引脚填写如图所示,该程序段主要用于执行归零
12
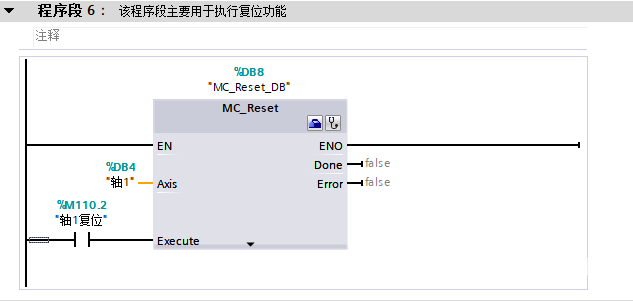
程序段6,调用MC_Reset,各个引脚填写如图所示,该程序段主要用于执行复位功能
13
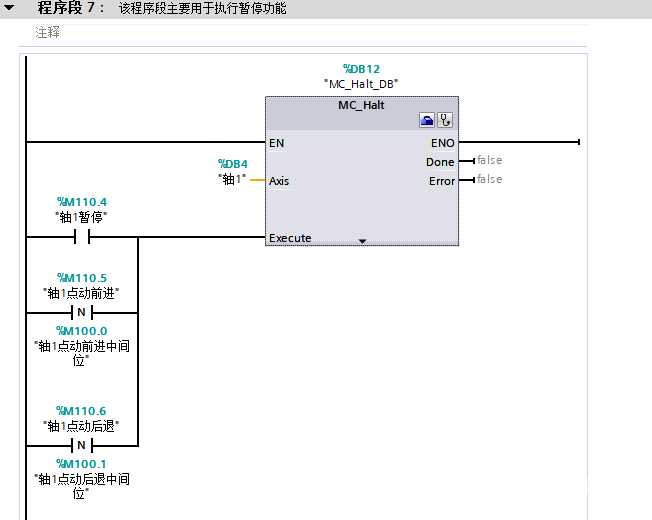
程序段7,调用MC_Halt,各个引脚填写如图所示,该程序段主要用于执行暂停功能
14
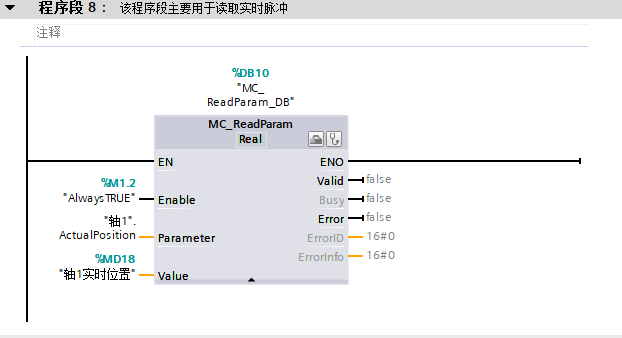
程序段8,调用MC_ReadParam,来读取相关参数,各个引脚填写如图所示,该程序段主要用于读取实时脉冲
| 步 骤 | 操作 | 说明 |
|---|---|---|
| 1 | 通过博图软件创建一个新的PLC项目, 根据硬件型号插入新设备,这里为 CPU 1214C DC DC DC |
 |
| 2 | 双击PLC的以太网口,设置IP地址, 这里设置为192.168.2.210 |
 |
| 3 | 双击CPU,在脉冲发生器PTO/PWM选项中设置信号类型为PTO,脉冲输出为Q0.0,方向输出为Q0.1 | 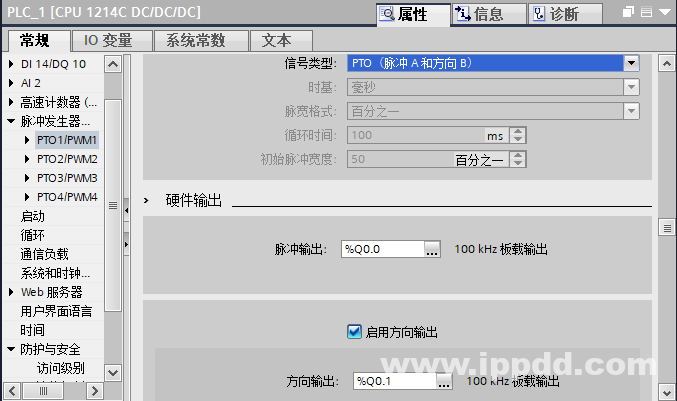 |
| 4 | 新建一个工艺对象,名称为轴1,通过基本参数>驱动器,设置脉冲输出为Pulse1 | 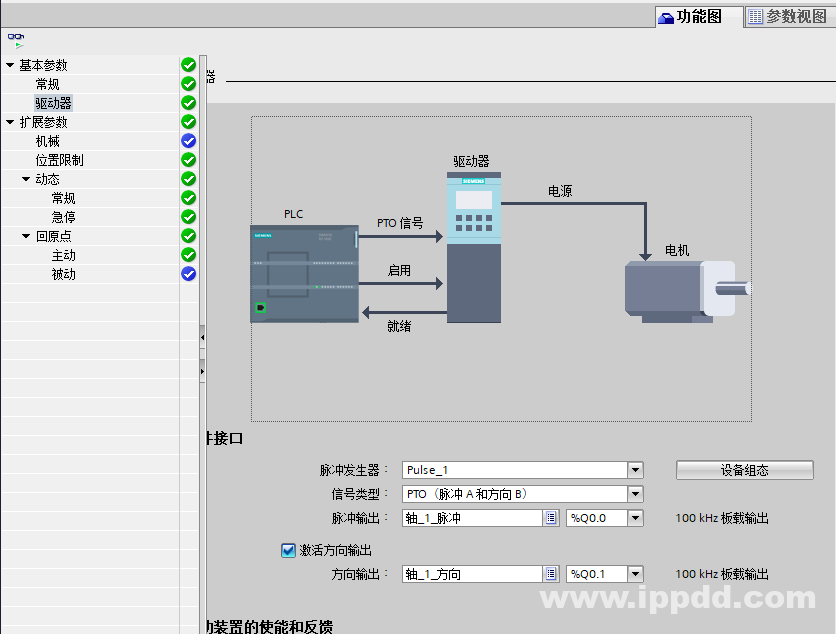 |
| 5 | 通过扩展参数>位置限制,设置上下限位分别为I0.1和I0.2 | |
| 6 | 通过扩展参数>回原点>主动,设置原点开关为I0.0 | |
| 7 | 程序段1,调用MC_Power使能,各个引脚填写如图所示,其中Asix选择轴1 | |
| 8 | 程序段2,调用MC_MoveRelative,各个引脚填写如图所示,该程序段主要用于执行相对运动 | |
| 9 | 程序段3,调用MC_MoveAbsolute,各个引脚填写如图所示,该程序段主要用于执行绝对运动 | |
| 10 | 程序段4,调用MC_MoveJog,各个引脚填写如图所示,该程序段主要用于执行前进和后退点动 | |
| 11 | 程序段5,调用MC_Home,各个引脚填写如图所示,该程序段主要用于执行归零 | |
| 12 | 程序段6,调用MC_Reset,各个引脚填写如图所示,该程序段主要用于执行复位功能 | |
| 13 | 程序段7,调用MC_Halt,各个引脚填写如图所示,该程序段主要用于执行暂停功能 | |
| 14 | 程序段8,调用MC_ReadParam,来读取相关参数,各个引脚填写如图所示,该程序段主要用于读取实时脉冲 |
05
上位机开发思路
Upper computer development
目前比较主流开发上位机的方式,主要是组态软件(触摸屏)、C#开发上位机,C#开发上位机与传统的组态软件之间的区别,主要体现在如下三个方面:
采用C#上位机开发,首先需要考虑的是通信问题。西门子S7-1200支持很多种不同的通信协议,包括S7、ModbusTCP、TCP/IP、UDP、OPC等,从开发成本上来说,我们优先考虑S7和ModbusTCP,对于S7和ModbusTCP通信协议,比较一下两者的优缺点:
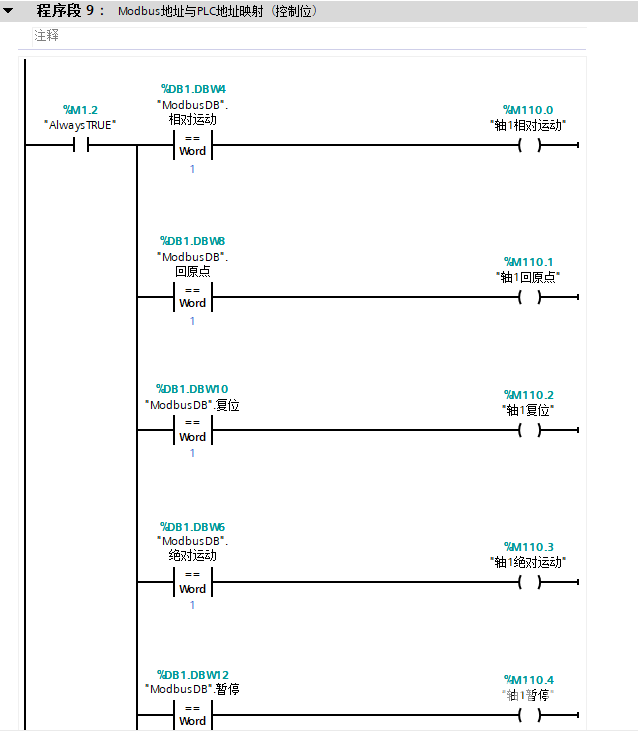
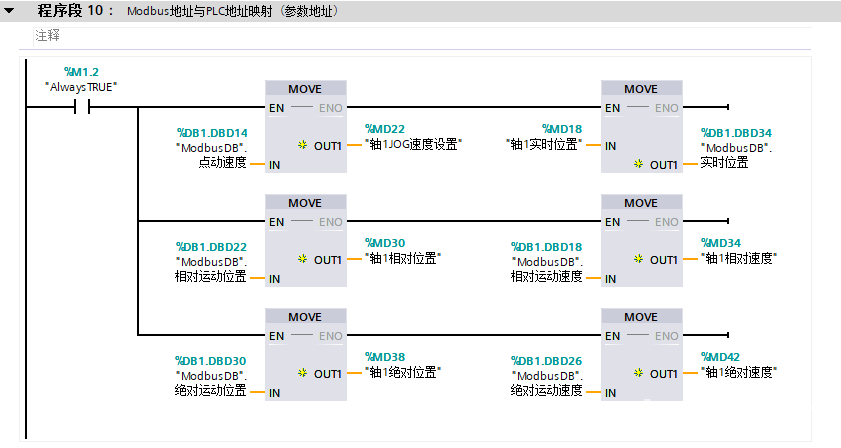
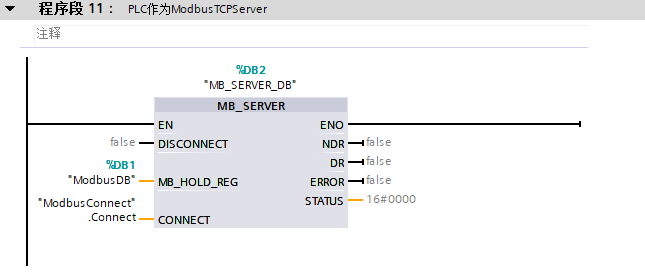
从公开免费和使用范围的角度来考虑,这里采用ModbusTCP通信协议,因为学会了ModbusTCP,意味着市场上的大部分仪表、PLC通信都可以搞得定,PLC程序编写如下如下所示:
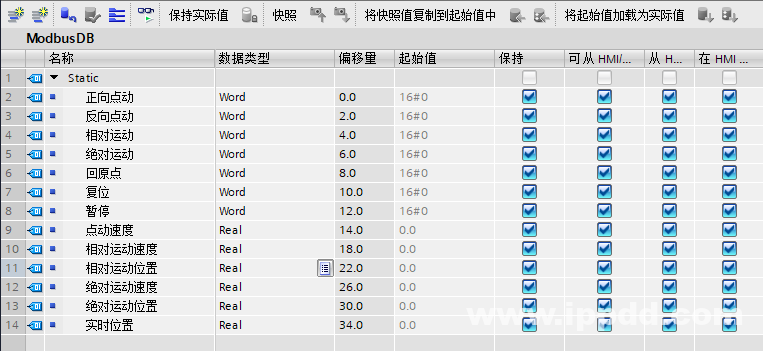
创建DB块
这里首先创建一个DB块,里面包含了常用的一些操作和参数设置,值得注意的是,由于Modbus保持型寄存器的Bit位操作比较麻烦,因此这里我们统一使用Word类型来代替Bit。

ModbusTCP通信库
上位机开发功能实现的核心在于ModbusTCP通信库编写,由于Modbus协议是公开免费,可以自己根据Modbus协议来开发,也可以使用开源的Modbus库,如NModbus等,有了ModbusTCP通信库之后,我们可以将更多的精力放在业务处理及逻辑处理上面。
这个项目整体来说难度不是很大,但是涉及的知识面比较广,非常适合上位机初学者进行学习和练手。
文章来源网络,版权归原作者所有,如有侵权请联系删除
